Обработка изображений: Недопустимое название — Викиучебник
Введение в дистанционное зондирование
Оптимизация изображения
Зачем мы оптимизируем спутниковые изображения? Различные методы оптимизации изображения используются для подготовки «сырых данных» таким образом, чтобы собственно анализ изображений был проще, быстрее и надёжнее. Выбор метода зависит от цели анализа. Ниже представлены два процесса:
Растягивание гистограмм
При цифровой обработке изображения его статистики изображаются на гистограмме оттенков серого (частотном распределении оттенков серого)
Гистограмма спутникового снимка справа до и после растягивания.
Форма гистограммы описывает диапазон контрастов спутникового снимка и позволяет делать выводы о его однородности. Например, распределение оттенков серого сузким максимумом указывает на малую контрастность.
Растягивание гистограммы является методом обработки отдельных значений в изображении. Растягивание используется для контрастного представления данных. Контрастное растягивание может быть использовано во многих различных процессах. Входные данные всегда растягиваются на диапазон 0-255.
Фильтр
Так называемые фильтры изменяют структуру изображения путём расчёта соотношений значений градаций серого соседних пикселей. Фильтры используют матрицы коэффициентов, которые вырезают небольшую область или матрицу из оригинального изображений с центром в заданной точке. Затем необходимо «прогнать» всё изображение через фильтр/матрицу.
Источник: Landsat
Окно «Фильтры» в программе обработки изображений IDRISI.
Цифровая обработка изображений | Altamisoft.ru
Для проведения анализа цифровых изображений и устранения с них различных технических изъянов, возникших при съемке, например, из-за неправильной настройки устройства захвата или дефектов (царапины, пылинки и т.д.) объектива видео- или фотокамеры, часто требуется
Такие операции, как удаление/подавление шумов, настройка яркости, контраста, резкости фотографий, цветокоррекция, сглаживание, компенсация дисторсии и многие другие, позволяют отредактировать изображение и подготовить его к печати или публикации. Существуют и специальные операции для работы с изображениями:  д.
д.
Цифровая обработка изображений включает в себя также создание панорамных изображений, полученных соединением нескольких кадров.
Программа для обработки изображений
Для ввода цифровых изображений с устройства захвата (видео-, веб- или фотокамеры) в компьютер и их последующего редактирования требуется определенная система для обработки изображений. В идеальном случае такая система должна также
Программа Altami Studio разработана специально для управления устройствами захвата изображений (или захвата видео), а также для анализа и обработки полученных кадров. Это кроссплатформенное приложение, которое может работать с различными моделями камер в большинстве популярных операционных систем (например, с Canon PowerShot и Canon EOS в ОС линейки Windows, в ОС на базе ядра Linux, а также в Mac OS).
Методы обработки изображений
Для редактирования цифровых изображений существуют различные алгоритмы обработки изображений, реализованные в современных программах. Их применение позволяет получить высокое качество изображения, а также устранить большинство возникших при съемке дефектов на фотографиях.
В программе Altami Studio разработаны такие методы обработки изображений, как:  Кроме того, программное обеспечение для обработки изображений Altami Studio имеет такую функцию, как
Кроме того, программное обеспечение для обработки изображений Altami Studio имеет такую функцию, как
Обработка рентгеновского изображения
Для анализа рентгеновского снимка часто требуется предварительно его отредактировать. В основном для этого настраивают яркость и контраст фотографии, используют операцию гамма-коррекции, а также алгоритмы обработки полутоновых изображений и многое другое.
Данные методы обработки изображений можно применить в программе Altami Studio. К тому же, с помощью преобразований для работы с фоном, предлагаемых этой системой, с рентгеновского изображения можно удалять артефакты, а фильтр  Применяя его, можно «раскрасить» изображение, присвоив пикселям те или иные цвета в результате квантования их по уровням яркости. Таким образом становятся различимы области с близкими по значению яркостями.
Применяя его, можно «раскрасить» изображение, присвоив пикселям те или иные цвета в результате квантования их по уровням яркости. Таким образом становятся различимы области с близкими по значению яркостями.
Читать другие материалы по теме:
Вам не подходят существующие решения?Анализ изображений
Захват изображения
Компенсация дисторсии изображения
Техническое (машинное) зрение
Обработка изображения в реальном времени
Панорамные изображения
Определение размера частиц
Контроль качества труб
Обработка изображений | Laboratory of Mathematical Methods of Image Processing
Андрей Насонов, Алексей Лукин, Андрей Крылов
Построение изображения высокого разрешения по изображению низкого разрешения является часто встречающейся задачей при обработке изображений.
Мы проводим исследования в двух направлениях:
- Реконструкция изображения высокого разрешения как решение некорректной обратной задачи для задачи построения изображения низкого разрешения по изображению высокого разрешения.

- Алгоритмы интерполяции низкой сложности для увеличения разрешения в реальном времени. Разрабатываются быстрые адаптивные к контурам алгоритмы увеличения изображений и видео.

Андрей Насонов, Андрей Крылов
Использование нескольких изображений низкого разрешения может повысить качество изображений высокого разрешения. Процесс реконструкции изображения высокого разрешения по нескольких изображениям низкого разрешения называется суперразрешением.
Проект развивается по трём направлениям:
- Неитерационное суперразрешение. Метод взвешенного медианного усреднения используется для комбинации значений пикселей исходных изображений низкого разрешения.
- Суперразрешение видеопоследовательностей. Для построения кадра высокого разрешения используется два изображения: текущий кадр низкого разрешения и результат повышения разрешения предыдущего кадра.

Андрей Насонов, Алексей Лукин, Андрей Крылов
Применение регуляризирующих методов для:
- повышения резкости
- подавления эффекта Гиббса (ложного оконтуривания)
- подавления шума
Андрей Насонов, Андрей Крылов
Метрики используются для объективного сравнения изображений.
Мы рассматриваем задачу оценки алгоритмов повышения качества изображений: повышения разрешения, подавления эффекта Гиббса, повышения резкости. Основная идея состоит в нахождении областей типичных артефактов алгоритмов повышения качества изображений: размытия и эффекта Гиббса.
Дмитрий Сорокин, Андрей Крылов
Поиск ключевых точек и построение локальных дескрипторов является одной из базовых задач анализа изображений.
Алгоритм поиска ключевых точек и построения дескрипторов основан на разложении изображения в ряд по круговым гармоническим функциям Гаусса-Лагерра. Для ускорения вычислений используется взаимосвязь между круговыми гармоническими функциями Гаусса-Лагерра и двумерными функциями Эрмита, а также быстрый проекционный метод Эрмита.
Темы текущих исследований:
- повышение стабильности дескрипторов ключевых точек Гаусса-Лагерра к проективным и фотометрическим преобразованиям
- адаптация поиска ключевых точек и построения дескрипторов к цветным изображениям
Пороговая обработка изображений следов дефектов
Сегментация изображения, т.е. разделение его на области, для которых выполняется определенный критерий, проводится на основе его пороговой обработки по яркости (бинаризации). Операция порогового разделения заключается в сопоставлении значения яркости каждого пикселя изображения с заданным значением порога. Выбор соответствующего значения пороговой величины дает возможность выделения на изображении областей определенного вида.
Компьютерная модель изображения индикаторного рисунка дефекта на контролируемой поверхности
В процессе бинаризации исходное полутоновое изображение, имеющее N уровней яркости, преобразуется в черно-белое, пиксели которого имеют только два значения – 0 и 1. Поскольку количество информации в бинарном изображении почти на порядок меньше, чем в исходном полутоновом изображении, то бинарное изображение легче обрабатывать, хранить и т.п.
Поскольку количество информации в бинарном изображении почти на порядок меньше, чем в исходном полутоновом изображении, то бинарное изображение легче обрабатывать, хранить и т.п.
Изображение в памяти персонального компьютера представляет собой матрицу точек, яркость которых соответствует яркости наблюдаемого изображения, а размер такой матрицы соответствует размеру изображения. Допустимый диапазон значений яркости отдельной точки (пикселя) изображения: 0 – 255, причем белому цвету соответствует уровень яркости 255, а черному – 0. Это справедливо в случае полутонового изображения с глубиной цвета 8 бит.
Пороговое (бинарное) изображение получается из исходного из следующего соотношения:
где r(x, y) и s(x, y) – уровни яркости пикселей изображения, L – пороговый уровень по яркости.
Таким образом, на изображении r(x, y) пиксели со значением, равным единице, относятся к объектам (в случае капиллярного контроля – это индикаторные следы дефектов), в то время как точки со значением, равным нулю, относятся к фону.
Пороговая обработка индикаторных рисунков дефектов
Для проведения эффективной сегментации изображений индикаторных рисунков с неоднородным фоном предлагается подход, при котором исходное изображение разбивается на подобласти так, что в пределах каждой из них уровень яркости фона остается приблизительно равномерным.
Если в случае глобальных методов для вычисления порога анализируется гистограмма всего изображения, то при локальных методах порогового преобразования исследуются гистограммы фрагментов изображения. В каждой из таких подобластей для сегментации используется свое локальное значение порога. Поскольку порог, применимый для каждого пикселя, оказывается зависящим от характеристик подобласти изображения, содержащей данный пиксель, такое пороговое преобразование является адаптивным.
Исходное изображение разбивается на m x n прямоугольных фрагментов: m по вертикали и n по горизонтали. От их размера зависит чувствительность метода к перепадам яркости фона. С одной стороны, желательно уменьшить размер фрагментов, чтобы хорошо обрабатывать достаточно резкие перепады яркости фона (например, пятна), но, с другой стороны, при уменьшении размера фрагментов появляется опасность, что элементы индикаторных рисунков будут приняты за фон, и появятся их искажения.
В каждом конкретном случае количество и размер прямоугольных элементов, на которые разбивается исходное изображение, выбирается экспериментально. В качестве критерия здесь можно использовать значения дисперсии уровней яркости пикселей, принадлежащих одной области разбиения.
Теория и методы цифровой обработки изображений
Лектор: доцент каф. ТСУЭФА, к.ф.-м.н. Плоских Виктор Александрович
- Ведение.
- Изображения как универсальный источник и носитель информации. Виды изображений и их источники: органические изображения, микроскопические изображения, традиционные изображения, Визуализация непространственной информации.
- Обобщенная схема регистрации изображений.
- Оптическое излучение. Светотехнические величины. Колориметрические характеристики. Оптико-электрические преобразователи. Обобщенное математическое описание системы регистрации изображений.
- Цифровое кодирование изображений.
- Кодирование с поэлементной обработкой: импульсно–кодовая модуляция (ИКМ), статистическое кодирование, кодирование с предсказанием. Цифровое кодирование изображений с пространственной обработкой: интерполяционные методы, кодирование на основе преобразования, кодирование признаков. Сокращение объема и частотного диапазона передаваемой информации.
- Статистические модели канала связи как источника помех.
- Помехи при передаче изображений с использование ИКМ и ДИКМ, кодирования на основе преобразования. Сравнение методов кодирования.
- Линейная обработка изображений.
- Импульсный отклик. Матричное представление процессов регистрации и линейной обработки изображений. Анизотропная фильтрация. Оптимальная линейная фильтрация.
- Обработка изображений как многомерных сигналов.
- Характеристики сигналов и систем в частотной области. Дискретизация непрерывных двумерных сигналов. Обработка непрерывных сигналов дискретными системами.
- Дискретный Фурье–анализ многомерных сигналов.
- Представление прямоугольно–периодических последовательностей в виде дискретных рядов Фурье. Многомерное дискретное преобразование Фурье (ДПФ). Вычисление ДПФ.
- Алгоритмы быстрых преобразований.
- Элементы матричного аппарата теории быстрых алгоритмов ортогональных преобразований. Сравнение линейных методов обработки изображений.
- Улучшение качества изображений.
- Изменение контраста. Изменение гистограммы. Подавление шумов. Подчеркивание границ. Обработка изображений с преобразованием. Медианная фильтрация Ложные и псевдоцвета. Улучшение спектрозональных изображений.
- Модели цифровой реставрации изображений.
- Методы реставрации изображений со сглаживанием. Методы реставрации с использованием ограничений. Методы реставрации изображений на основе статистического оценивания. Реставрация изображений с целью подавления ошибок наложения спектров. Реставрация изображений методом гомоморфной фильтрации. Слепая реставрация изображений. Реставрация изображений с пространственно зависимыми искажениями. Реставрация изображений методом рекурсивной фильтрации.
- Выделение признаков изображения: яркостных, гистограммных, пространственно–спектральных и контурных.
- Эффективность алгоритмов обнаружения перепадов яркости. Цветовые контуры. Признаки пятна и линии. Текстурные признаки, синтез текстур. Связность. Сжатие, утончение и построение остова. Описание линий и формы. Сегментация по яркости, контурная и текстурная сегментация, сегментация формы. Обнаружение объектов и совмещение (привязка) изображений: сопоставление с эталоном, и согласованная фильтрация.
- Системы распознавания образов.
- Модели систем понимания изображений. Синтаксические методы. Методы, использующие отношения между объектами.
 Цифровое кодирование изображений с пространственной обработкой: интерполяционные методы, кодирование на основе преобразования, кодирование признаков. Сокращение объема и частотного диапазона передаваемой информации.
Цифровое кодирование изображений с пространственной обработкой: интерполяционные методы, кодирование на основе преобразования, кодирование признаков. Сокращение объема и частотного диапазона передаваемой информации. Многомерное дискретное преобразование Фурье (ДПФ). Вычисление ДПФ.
Многомерное дискретное преобразование Фурье (ДПФ). Вычисление ДПФ.
Литература
- Цифровая обработка изображений : монография / Р. Гонсалес, Р. Вудс ; пер.с англ. под ред. : П. А. Чочиа. — М. : Техносфера, 2005. — 1072 с.
- Цифровая обработка сигналов [Текст] : учебник / А. Оппенгейм, Р. Шафер ; ред. А. Б. Сергиенко ; пер. с англ. С. А. Кулешов. — 2-е изд., испр. — М. : Техносфера, 2009. — 856 с.
- Д. Даджион, Р. Мерсеро. Цифровая обработка многомерных сигналов. М.: Мир, 1988.
- У. Прэт. Цифровая обработка изображений. В 2–х книгах. М.: Мир, 1982.
- Вычислительная оптика. Справочник. / Под. общ. ред. М.М. Русинова. Л.: Машиностроение, 1984.
- Цифровая обработка сигналов и ее применения. / Под. общ. ред. Л.П. Ярославского. М.: Наука, 1981.
- Быстрые алгоритмы в цифровой обработке изображений. / Под. ред. Т.С. Хуанга. М.: Радио и связь, 1984.
- Б.В. Анисимов, В.Д. Курганов, В.К. Злобин. Распознавание и обработка изображений. М.: Высш. шк., 1983.
 — М. : Техносфера, 2009. — 856 с.
— М. : Техносфера, 2009. — 856 с.Введение в обработку изображений в Python с OpenCV
В этом уроке мы узнаем, как мы можем выполнять обработку изображений с использованием языка Python. Мы не собираемся ограничиваться одной библиотекой или структурой; однако есть одна, которую мы будем использовать чаще всего, — библиотека Open CV. Мы начнем с небольшого разговора об обработке изображений, а затем перейдем к рассмотрению различных приложений / сценариев, где обработка изображений может оказаться полезной. Итак, начнем!
Мы не собираемся ограничиваться одной библиотекой или структурой; однако есть одна, которую мы будем использовать чаще всего, — библиотека Open CV. Мы начнем с небольшого разговора об обработке изображений, а затем перейдем к рассмотрению различных приложений / сценариев, где обработка изображений может оказаться полезной. Итак, начнем!
Что такое обработка изображений?
Важно знать, что именно представляет собой обработка изображений и какова ее роль в общей картине, прежде чем углубляться в ее принципы. Обработка изображений чаще всего называется «Цифровая обработка изображений», а область, в которой она часто используется, — «Компьютерное зрение». Не смущайтесь — мы поговорим об этих терминах и о том, как они связаны. Оба алгоритма обработки изображений и алгоритмы Computer Vision (CV) принимают изображение в качестве входных данных; однако при обработке изображения вывод также является изображением, тогда как в компьютерном зрении выводом могут быть некоторые особенности / информация об изображении.
Оба алгоритма обработки изображений и алгоритмы Computer Vision (CV) принимают изображение в качестве входных данных; однако при обработке изображения вывод также является изображением, тогда как в компьютерном зрении выводом могут быть некоторые особенности / информация об изображении.
Зачем нам это нужно?
Данные, которые мы собираем или генерируем, в основном представляют собой необработанные данные, т.е. они не подходят для непосредственного использования в приложениях по ряду возможных причин. Поэтому нам нужно сначала проанализировать его, выполнить необходимую предварительную обработку, а затем использовать ее.
Например, давайте предположим, что мы пытались создать классификатор котов. Наша программа будет принимать изображение в качестве входных данных и затем сообщать нам, содержит ли изображение кошку или нет. Первым шагом для построения этого классификатора было бы собрать сотни фотографий кошек. Одна общая проблема заключается в том, что все скопированные нами изображения не будут иметь одинаковый размер, поэтому перед передачей их в модель для обучения нам потребуется изменить их размер / предварительно обработать до стандартного размера.
Наша программа будет принимать изображение в качестве входных данных и затем сообщать нам, содержит ли изображение кошку или нет. Первым шагом для построения этого классификатора было бы собрать сотни фотографий кошек. Одна общая проблема заключается в том, что все скопированные нами изображения не будут иметь одинаковый размер, поэтому перед передачей их в модель для обучения нам потребуется изменить их размер / предварительно обработать до стандартного размера.
Это только одна из многих причин, по которым обработка изображений необходима для любого приложения компьютерного зрения.
Предпосылки
Прежде чем идти дальше, давайте обсудим, что вам нужно знать, чтобы легко следовать этому учебнику. Во-первых, вы должны иметь базовые знания программирования на любом языке. Во-вторых, вы должны знать, что такое машинное обучение и как оно работает, поскольку в этой статье мы будем использовать некоторые алгоритмы машинного обучения для обработки изображений. В качестве бонуса было бы полезно, если бы вы имели какое-либо представление или базовые знания об Open CV, прежде чем продолжить изучение этого урока. Но это не обязательно.
Во-первых, вы должны иметь базовые знания программирования на любом языке. Во-вторых, вы должны знать, что такое машинное обучение и как оно работает, поскольку в этой статье мы будем использовать некоторые алгоритмы машинного обучения для обработки изображений. В качестве бонуса было бы полезно, если бы вы имели какое-либо представление или базовые знания об Open CV, прежде чем продолжить изучение этого урока. Но это не обязательно.
Чтобы следовать этому уроку, вы должны определенно знать, как именно изображение представляется в памяти. Каждое изображение представлено набором пикселей, то есть матрицей значений пикселей. Для изображения в градациях серого значения пикселей варьируются от 0 до 255, и они представляют интенсивность этого пикселя. Например, если у вас есть изображение размером 20 x 20, оно будет представлено матрицей 20 x 20 (всего 400-пиксельных значений).
Если вы имеете дело с цветным изображением, вы должны знать, что оно будет иметь три канала — Красный, Зеленый и Синий (RGB). Следовательно, было бы три таких матрицы для одного изображения.
Установка
Примечание. Поскольку мы собираемся использовать OpenCV через Python, подразумевается, что на вашей рабочей станции уже установлен Python (версии 3).
Windows
pip install opencv-pythonMacOS
brew install opencv3 --with-contrib --with-python3Linux
sudo apt-get install libopencv-dev python-opencvЧтобы проверить, была ли ваша установка успешной или нет, выполните следующую команду в оболочке Python или в командной строке:
Некоторые основы, которые вы должны знать
Прежде чем перейти к использованию обработки изображений в приложении, важно получить представление о том, какие операции попадают в эту категорию и как выполнять эти операции. Эти операции, наряду с другими, будут использоваться позже в наших приложениях. Итак, давайте вернемся к этому.
Эти операции, наряду с другими, будут использоваться позже в наших приложениях. Итак, давайте вернемся к этому.
Для этой статьи мы будем использовать следующее изображение:
Примечание. Исходный размер, который мы используем, составляет около 1180×786.
Вы, вероятно, заметили, что изображение в настоящее время цветное, что означает, что оно представлено тремя цветными каналами: красным, зеленым и синим. Мы будем преобразовывать изображение в градации серого, а также разбивать изображение на отдельные каналы, используя код ниже.
Поиск деталей изображения
После загрузки изображения с помощью функции imread() мы можем получить некоторые простые свойства, такие как количество пикселей и размеры:
import cv2
img = cv2.imread('rose.jpg')
print("Image Properties")
print("- Number of Pixels: " + str(img.size))
print("- Shape/Dimensions: " + str(img.shape))
Выход:
Image Properties
- Number of Pixels: 2782440
- Shape/Dimensions: (1180, 786, 3)
Разделение изображения на отдельные каналы
Теперь мы разделим изображение на его красные, зеленые и синие компоненты с помощью OpenCV и отобразим их:
from google. colab.patches import cv2_imshow
blue, green, red = cv2.split(img) # Split the image into its channels
img_gs = cv2.imread('rose.jpg', cv2.IMREAD_GRAYSCALE) # Convert image to grayscale
cv2_imshow(red) # Display the red channel in the image
cv2_imshow(blue) # Display the red channel in the image
cv2_imshow(green) # Display the red channel in the image
cv2_imshow(img_gs) # Display the grayscale version of image
 colab.patches import cv2_imshow
blue, green, red = cv2.split(img) # Split the image into its channels
img_gs = cv2.imread('rose.jpg', cv2.IMREAD_GRAYSCALE) # Convert image to grayscale
cv2_imshow(red) # Display the red channel in the image
cv2_imshow(blue) # Display the red channel in the image
cv2_imshow(green) # Display the red channel in the image
cv2_imshow(img_gs) # Display the grayscale version of image
colab.patches import cv2_imshow
blue, green, red = cv2.split(img) # Split the image into its channels
img_gs = cv2.imread('rose.jpg', cv2.IMREAD_GRAYSCALE) # Convert image to grayscale
cv2_imshow(red) # Display the red channel in the image
cv2_imshow(blue) # Display the red channel in the image
cv2_imshow(green) # Display the red channel in the image
cv2_imshow(img_gs) # Display the grayscale version of image
Для краткости мы просто покажем изображение в градациях серого.
Изображение в градациях серого:
Thresholding изображения (сегментация)
Концепция сегментации довольно проста. Как обсуждалось выше в представлении изображения, значениями пикселей могут быть любые значения от 0 до 255. Допустим, мы хотим преобразовать изображение в двоичное изображение, то есть назначить пикселю значение 0 или 1. Для этого мы можем выполнить сегментацию. Например, если значение Threshold(T) равно 125, тогда всем пикселям со значениями больше 125 будет присвоено значение 1, а всем пикселям со значениями, меньшими или равными этому, будет присвоено значение 0. Давайте сделаем это через код, чтобы получить лучшее понимание.
Как обсуждалось выше в представлении изображения, значениями пикселей могут быть любые значения от 0 до 255. Допустим, мы хотим преобразовать изображение в двоичное изображение, то есть назначить пикселю значение 0 или 1. Для этого мы можем выполнить сегментацию. Например, если значение Threshold(T) равно 125, тогда всем пикселям со значениями больше 125 будет присвоено значение 1, а всем пикселям со значениями, меньшими или равными этому, будет присвоено значение 0. Давайте сделаем это через код, чтобы получить лучшее понимание.
Изображение, используемое для Thresholding:
import cv2
# Read image
img = cv2.imread('image. png', 0)
# Perform binary thresholding on the image with T = 125
r, threshold = cv2.threshold(img, 125, 255, cv2.THRESH_BINARY)
cv2_imshow(threshold)
 png', 0)
# Perform binary thresholding on the image with T = 125
r, threshold = cv2.threshold(img, 125, 255, cv2.THRESH_BINARY)
cv2_imshow(threshold)
png', 0)
# Perform binary thresholding on the image with T = 125
r, threshold = cv2.threshold(img, 125, 255, cv2.THRESH_BINARY)
cv2_imshow(threshold)
Выход:
Как вы можете видеть, в результирующем изображении были установлены две области: черная область (значение пикселя 0) и белая область (значение пикселя 1). Оказывается, установленный нами порог был прямо посередине изображения, поэтому значения черного и белого делятся там.
Приложения
1: удаление шума с изображения
Теперь, когда у вас есть общее представление о том, что такое обработка изображений и для чего она используется, давайте продолжим и узнаем о некоторых из ее конкретных приложений.
В большинстве случаев исходные данные, которые мы собираем, содержат шум, то есть нежелательные функции, которые затрудняют восприятие изображения. Хотя эти изображения можно использовать непосредственно для извлечения признаков, точность алгоритма сильно пострадает. Вот почему обработка изображений применяется к изображению перед передачей его алгоритму для получения большей точности.
Существует много различных типов шума, таких как гауссовский шум, шум соли и перца и т.д. Мы можем удалить этот шум из изображения, применив фильтр, который удаляет этот шум или, по крайней мере, сводит к минимуму его влияние. Есть много вариантов, когда речь идет о фильтрах, каждый из которых имеет свои сильные стороны, и, следовательно, является лучшим для определенного типа шума.
Чтобы понять это должным образом, мы добавим шум «соль и перец» в версию изображения розы в оттенках серого, которую мы рассмотрели выше, а затем попытаемся удалить этот шум из нашего шумного изображения, используя различные фильтры, и посмотрим, какой из них лучше подходит для этого типа.
import numpy as np
# Adding salt & pepper noise to an image
def salt_pepper(prob):
# Extract image dimensions
row, col = img_gs.shape
# Declare salt & pepper noise ratio
s_vs_p = 0.5
output = np.copy(img_gs)
# Apply salt noise on each pixel individually
num_salt = np.ceil(prob * img_gs.size * s_vs_p)
coords = [np.random.randint(0, i - 1, int(num_salt))
for i in img_gs. shape]
output[coords] = 1
# Apply pepper noise on each pixel individually
num_pepper = np.ceil(prob * img_gs.size * (1. - s_vs_p))
coords = [np.random.randint(0, i - 1, int(num_pepper))
for i in img_gs.shape]
output[coords] = 0
cv2_imshow(output)
return output
# Call salt & pepper function with probability = 0.5
# on the grayscale image of rose
sp_05 = salt_pepper(0.5)
# Store the resultant image as 'sp_05.jpg'
cv2.imwrite('sp_05.jpg', sp_05)
 shape]
output[coords] = 1
# Apply pepper noise on each pixel individually
num_pepper = np.ceil(prob * img_gs.size * (1. - s_vs_p))
coords = [np.random.randint(0, i - 1, int(num_pepper))
for i in img_gs.shape]
output[coords] = 0
cv2_imshow(output)
return output
# Call salt & pepper function with probability = 0.5
# on the grayscale image of rose
sp_05 = salt_pepper(0.5)
# Store the resultant image as 'sp_05.jpg'
cv2.imwrite('sp_05.jpg', sp_05)
shape]
output[coords] = 1
# Apply pepper noise on each pixel individually
num_pepper = np.ceil(prob * img_gs.size * (1. - s_vs_p))
coords = [np.random.randint(0, i - 1, int(num_pepper))
for i in img_gs.shape]
output[coords] = 0
cv2_imshow(output)
return output
# Call salt & pepper function with probability = 0.5
# on the grayscale image of rose
sp_05 = salt_pepper(0.5)
# Store the resultant image as 'sp_05.jpg'
cv2.imwrite('sp_05.jpg', sp_05)
Хорошо, мы добавили шум к нашему изображению розы, и вот как это выглядит сейчас:
Шумное изображение:
Теперь давайте применим к нему различные фильтры и запишем наши наблюдения, т. е. насколько хорошо каждый фильтр уменьшает шум.
е. насколько хорошо каждый фильтр уменьшает шум.
Арифметический фильтр с Sharpening Kernel
# Create our sharpening kernel, the sum of all values must equal to one for uniformity
kernel_sharpening = np.array([[-1,-1,-1],
[-1, 9,-1],
[-1,-1,-1]])
# Applying the sharpening kernel to the grayscale image & displaying it.
print("\n\n--- Effects on S&P Noise Image with Probability 0.5 ---\n\n")
# Applying filter on image with salt & pepper noise
sharpened_img = cv2.filter2D(sp_05, -1, kernel_sharpening)
cv2_imshow(sharpened_img)
Полученное изображение от применения арифметического фильтра к изображению с шумом соли и перца показано ниже. При сравнении с исходным изображением в оттенках серого мы видим, что оно слишком сильно осветляет изображение и не может выделить яркие пятна на розе. Следовательно, можно сделать вывод, что арифметический фильтр не может удалить шум соли и перца.
При сравнении с исходным изображением в оттенках серого мы видим, что оно слишком сильно осветляет изображение и не может выделить яркие пятна на розе. Следовательно, можно сделать вывод, что арифметический фильтр не может удалить шум соли и перца.
Выход арифметического фильтра:
Фильтр средней точки
from scipy.ndimage import maximum_filter, minimum_filter
def midpoint(img):
maxf = maximum_filter(img, (3, 3))
minf = minimum_filter(img, (3, 3))
midpoint = (maxf + minf) / 2
cv2_imshow(midpoint)
print("\n\n---Effects on S&P Noise Image with Probability 0. 5---\n\n")
midpoint(sp_05)
 5---\n\n")
midpoint(sp_05)
5---\n\n")
midpoint(sp_05)
Полученное изображение от применения фильтра средней точки на изображении с шумом соли и перца показано ниже. При сравнении с исходным изображением в градациях серого мы видим, что, подобно методу kernel, приведенному выше, изображение становится слишком ярким; Тем не менее, он может выделить яркие пятна на розе. Поэтому мы можем сказать, что это лучший выбор, чем арифметический фильтр, но все же он не восстанавливает исходное изображение полностью.
Выход фильтра средней точки:
Контрагармонический средний фильтр
Примечание. Реализации этих фильтров можно легко найти в Интернете, и то, как именно они работают, выходит за рамки данного руководства. Мы будем смотреть на приложения с абстрактного / более высокого уровня.
Реализации этих фильтров можно легко найти в Интернете, и то, как именно они работают, выходит за рамки данного руководства. Мы будем смотреть на приложения с абстрактного / более высокого уровня.
def contraharmonic_mean(img, size, Q):
num = np.power(img, Q + 1)
denom = np.power(img, Q)
kernel = np.full(size, 1.0)
result = cv2.filter2D(num, -1, kernel) / cv2.filter2D(denom, -1, kernel)
return result
print("\n\n--- Effects on S&P Noise Image with Probability 0.5 ---\n\n")
cv2_imshow(contraharmonic_mean(sp_05, (3,3), 0.5))
Результирующее изображение от применения фильтра Contraharmonic Mean к изображению с шумом соли и перца показано ниже. При сравнении с исходным изображением в градациях серого мы видим, что оно воспроизводило почти то же самое изображение, что и исходное. Его уровень интенсивности / яркости одинаков, и он также выделяет яркие пятна на розе. Следовательно, мы можем сделать вывод, что фильтр с контрастным антигармоническим эффектом очень эффективен для борьбы с шумом соли и перца.
Его уровень интенсивности / яркости одинаков, и он также выделяет яркие пятна на розе. Следовательно, мы можем сделать вывод, что фильтр с контрастным антигармоническим эффектом очень эффективен для борьбы с шумом соли и перца.
Результат работы контрагармонического среднего фильтра:
Теперь, когда мы нашли лучший фильтр для восстановления исходного изображения из зашумленного, мы можем перейти к следующему этапу.
2: Обнаружение края с помощью Canny Edge Detector
Изображение розы, которое мы использовали до сих пор, имеет постоянный фон, т. е. черный, поэтому мы будем использовать другое изображение для этого приложения, чтобы лучше показать возможности алгоритма. Причина в том, что если фон постоянен, это делает задачу обнаружения края довольно простой, и мы этого не хотим.
е. черный, поэтому мы будем использовать другое изображение для этого приложения, чтобы лучше показать возможности алгоритма. Причина в том, что если фон постоянен, это делает задачу обнаружения края довольно простой, и мы этого не хотим.
Ранее в этом уроке мы говорили о классификаторе кошек, давайте рассмотрим этот пример и посмотрим, как обработка изображений играет в этом важную роль.
В алгоритме классификации сначала сканируется изображение на предмет «объектов», т.е. при вводе изображения алгоритм находит все объекты на этом изображении, а затем сравнивает их с характеристиками объекта, который вы пытаетесь найти. В случае классификатора кошки, он будет сравнивать все объекты, найденные в изображении, с характеристиками изображения кошки, и, если совпадение найдено, он говорит нам, что входное изображение содержит кошку.
Поскольку мы используем классификатор cat в качестве примера, будет справедливо, что мы будем использовать изображение cat в будущем. Ниже изображение, которое мы будем использовать:
import cv2
import numpy as np
from matplotlib import pyplot as plt
# Declaring the output graph's size
plt.figure(figsize=(16, 16))
# Convert image to grayscale
img_gs = cv2.imread('cat.jpg', cv2.IMREAD_GRAYSCALE)
cv2.imwrite('gs.jpg', img_gs)
# Apply canny edge detector algorithm on the image to find edges
edges = cv2.Canny(img_gs, 100,200)
# Plot the original image against the edges
plt.subplot(121), plt.imshow(img_gs)
plt.title('Original Gray Scale Image')
plt. subplot(122), plt.imshow(edges)
plt.title('Edge Image')
# Display the two images
plt.show()
 subplot(122), plt.imshow(edges)
plt.title('Edge Image')
# Display the two images
plt.show()
subplot(122), plt.imshow(edges)
plt.title('Edge Image')
# Display the two images
plt.show()
Результат обнаружения края:
Как вы можете видеть, часть изображения, которая содержит объект, который в данном случае является кошкой, была расставлена точками / отделена посредством обнаружения края. Теперь вам должно быть интересно, что такое Canny Edge Detector и как он это сделал; так что давайте обсудим это сейчас.
Чтобы понять вышесказанное, необходимо обсудить три ключевых шага. Во-первых, он выполняет шумоподавление на изображении аналогично тому, как мы обсуждали ранее. Во-вторых, он использует первую производную в каждом пикселе, чтобы найти края. Логика этого заключается в том, что в точке, где существует ребро, происходит резкое изменение интенсивности, что вызывает скачок значения первой производной, что делает этот пиксель «краевым пикселем».
Во-вторых, он использует первую производную в каждом пикселе, чтобы найти края. Логика этого заключается в том, что в точке, где существует ребро, происходит резкое изменение интенсивности, что вызывает скачок значения первой производной, что делает этот пиксель «краевым пикселем».
В конце он выполняет гистерезисный порог; мы сказали выше, что есть скачок в значении первой производной на ребре, но мы не указали, «насколько высоким» должен быть скачок, чтобы его можно было классифицировать как ребро — это называется порогом! Ранее в этом уроке мы обсуждали, что такое простой порог. Гистерезисный порог является улучшением в том, что он использует два пороговых значения вместо одного. Причина этого заключается в том, что если пороговое значение слишком высокое, мы можем пропустить некоторые фактические ребра (истинные негативы), а если значение слишком низкое, мы получим множество точек, классифицированных как ребра, которые на самом деле не являются ребрами (ложные срабатывания). Одно пороговое значение установлено высоким, а другое низким. Все точки, которые находятся выше «верхнего порогового значения», обозначены как ребра, затем оцениваются все точки, которые находятся выше нижнего порогового значения, но ниже верхнего порогового значения; точки, которые близки или являются соседями точек, которые были определены как ребра, также идентифицируются как ребра, а остальные отбрасываются.
Одно пороговое значение установлено высоким, а другое низким. Все точки, которые находятся выше «верхнего порогового значения», обозначены как ребра, затем оцениваются все точки, которые находятся выше нижнего порогового значения, но ниже верхнего порогового значения; точки, которые близки или являются соседями точек, которые были определены как ребра, также идентифицируются как ребра, а остальные отбрасываются.
Это базовые концепции / методы, которые алгоритм Canny Edge Detector использует для идентификации краев на изображении.
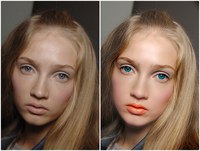
«Обработка изображений: технология, методы, применение»
Вашему вниманию предлагается еще одно учебное пособие, и тоже по большей части теоретического свойства — на этот раз на тему построения прикладных систем обработки изображений. Список областей, в которых требуется обработка изображений, довольно широк. Это и дистанционное зондирование земной поверхности из космоса, и проектирование микросхем, и решение проблемы ввода карт и технических чертежей в географические информационные системы (ГИС) и системы автоматизированного проектирования (САПР). Целью данной книги является восполнение пробела в русскоязычных научных публикациях по обработке изображений. Книга состоит из трех частей. Сначала рассматриваются методологические основы обработки изображений, дается анализ предметной области, исходной информации, рассматриваются существующие системы и технологии обработки информации, анализируются устройства ввода изображений и графические форматы. Вторая часть посвящена методам и алгоритмам обработки и распознавания изображений. Рассматриваются методы предварительной обработки изображений, векторизации распознавания объектов на полутоновых и бинарных изображениях, описываются методы контроля качества полученной продукции, анализируются способы представления изображений и устройств вывода изображений.
Список областей, в которых требуется обработка изображений, довольно широк. Это и дистанционное зондирование земной поверхности из космоса, и проектирование микросхем, и решение проблемы ввода карт и технических чертежей в географические информационные системы (ГИС) и системы автоматизированного проектирования (САПР). Целью данной книги является восполнение пробела в русскоязычных научных публикациях по обработке изображений. Книга состоит из трех частей. Сначала рассматриваются методологические основы обработки изображений, дается анализ предметной области, исходной информации, рассматриваются существующие системы и технологии обработки информации, анализируются устройства ввода изображений и графические форматы. Вторая часть посвящена методам и алгоритмам обработки и распознавания изображений. Рассматриваются методы предварительной обработки изображений, векторизации распознавания объектов на полутоновых и бинарных изображениях, описываются методы контроля качества полученной продукции, анализируются способы представления изображений и устройств вывода изображений. В последней части представлены реализованные практически системы для обработки и распознавания изображений: карт и чертежей, земной поверхности, интегральных микросхем. В заключение — ситуация в сфере обработки изображений в Беларуси, знакомство с коллективами, работающими в данной области, и определение направлений дальнейших исследований.
В последней части представлены реализованные практически системы для обработки и распознавания изображений: карт и чертежей, земной поверхности, интегральных микросхем. В заключение — ситуация в сфере обработки изображений в Беларуси, знакомство с коллективами, работающими в данной области, и определение направлений дальнейших исследований.
Книга содержит многочисленные иллюстрации, облегчающие восприятие материала. Она предназначена прежде всего для студентов и научных работников, деятельность которых связана с обработкой изображений. Будет полезна специалистам по информатике и информационным технологиям, занятым в данной области.
|
|



Введение в обработку изображений — блог Udentify
В настоящее время системы обработки изображений, которые используются в различных сферах деятельности компаний, относятся к быстрорастущим технологиям.Обработка изображений также является основной областью исследований в инженерных дисциплинах и информатике.
Что такое обработка изображений? Обработка изображений направлена на преобразование изображения в цифровую форму и выполнение над ним некоторой обработки, чтобы получить улучшенное изображение или извлечь из него некоторую используемую информацию. Это метод, который разработан для преобразования изображения в цифровую форму и выполнения некоторых операций для получения конкретных моделей или извлечения из них полезной информации. Входом этого метода является видео-фрагмент или изображение, например фотография.Результат соответствует желаемой или привлекающей внимание части изображения. Обычно система обработки изображений обрабатывает изображения как двумерные сигналы при применении заранее определенных методов обработки сигналов.
Обычно система обработки изображений обрабатывает изображения как двумерные сигналы при применении заранее определенных методов обработки сигналов.
- Получение изображений с помощью оптического сканера или цифровых фотографий.
- Анализируйте и используйте изображения, которые включают в себя образцы окрашивания, отличные от человека, такие как сжатие данных, улучшение изображения и спутниковые фотографии.
- Готовый к использованию результат, измененный на основе анализа результатов изображения.
Есть разные цели обработки изображений:
- Визуализация — наблюдение за объектами, которые трудно увидеть.
- Повышение резкости и восстановление изображения — Улучшение зашумленных изображений.
- Поиск изображений — привлекательный поиск изображений с высоким разрешением.
- Распознавание образов — Определение различных объектов на изображении.
- Распознавание изображений — обнаружение объектов на изображении.

Для обработки изображений используются два метода: аналоговый и цифровой. Для печатных копий, таких как фотокопии и фотографии, можно использовать методы аналоговой или визуальной обработки изображений. При использовании этих визуальных методов аналитики изображений интерпретируют различные фоны. Обработка изображений не должна ограничиваться техническими знаниями, а должна основываться на воображении и мыслительных способностях инженеров. Еще одним важным инструментом в области обработки изображений с помощью визуальных методов являются необработанные данные, то есть прошлые собранные и необработанные изображения.Аналитики обучают систему предыдущим операциям с продуктами, которые они хотят идентифицировать. Как тип глубокого обучения обработка изображений работает с учетом исторических данных.
Методы цифровой обработки помогают управлять цифровыми изображениями с помощью компьютеров. Изображения со спутниковой платформы неполные из-за ошибки датчика. Чтобы преодолеть эти недостатки и получить достоверность информации, она должна пройти различные этапы обработки. Есть три основных шага, которые должны пройти все виды данных при использовании цифровых технологий; Предварительная обработка, проявка и визуализация — это извлечение информации.
Изображения со спутниковой платформы неполные из-за ошибки датчика. Чтобы преодолеть эти недостатки и получить достоверность информации, она должна пройти различные этапы обработки. Есть три основных шага, которые должны пройти все виды данных при использовании цифровых технологий; Предварительная обработка, проявка и визуализация — это извлечение информации.
Распознавание лиц — одно из наиболее часто используемых приложений для обработки изображений в мире. Технически следуя методологии глубокого обучения, машина сначала обучается особенностям человеческого лица. Описательные особенности, такие как расстояние между двумя глазами, форма среднего человеческого лица, служат метриками для формирования формы лица. После обучения человеческим критериям лица, он принимает все объекты на изображении, которые имеют ту же форму, что и лицо.Обнаружение лица осуществляется путем определения конкретных показателей, составляющих лицо человека. Обнаружение лиц — жизненно важный инструмент для отслеживания клиентов на пути к покупкам. После процесса обнаружения лиц клиенты могут быть сгруппированы в несколько кластеров для определения их характеристик. С помощью этого процесса можно узнать количество клиентов и их основные характеристики, чтобы определить наиболее эффективный способ увеличения продаж.
После процесса обнаружения лиц клиенты могут быть сгруппированы в несколько кластеров для определения их характеристик. С помощью этого процесса можно узнать количество клиентов и их основные характеристики, чтобы определить наиболее эффективный способ увеличения продаж.
Проверяли ли вы наше решение для бизнес-аналитики с помощью анализа тепловых карт? Вы можете начать использовать Udentify, который анализирует поведение покупателей в обычных магазинах.Udentify обеспечивает локальный коэффициент конверсии, подсчет голов, тепловые карты и анализ заказов. Благодаря технологии обработки изображений он может анонимно следить за клиентами, что придает значение данным, собранным в результате отслеживания, путем преобразования их в статистические модели. Он позволяет менеджерам компании принимать ориентированные на данные решения через интерфейс управления.
Шериф Али Энес ЙолкуKNIME Обработка изображений | KNIME
Расширение обработки изображений KNIME позволяет вам читать более 140 различных видов изображений (благодаря API-интерфейсу Bio-Formats) и применять к изображениям хорошо известные методы, такие как предварительная обработка. сегментация, извлечение признаков, отслеживание и классификация в KNIME. Как правило, эти узлы работают с данными многомерных изображений (например, видео, 3D-изображения, многоканальные изображения или даже их комбинация), что стало возможным благодаря внутреннему используемому ImgLib2-API.
сегментация, извлечение признаков, отслеживание и классификация в KNIME. Как правило, эти узлы работают с данными многомерных изображений (например, видео, 3D-изображения, многоканальные изображения или даже их комбинация), что стало возможным благодаря внутреннему используемому ImgLib2-API.
Доступно несколько узлов для расчета характеристик изображения (например, зернике, текстуры или гистограммы) для сегментированных изображений (например, одной ячейки). Затем эти векторы признаков можно использовать для применения методов машинного обучения, чтобы обучать и применять классификатор.
В настоящее время подключаемый модуль обработки изображений для KNIME предоставляет ок. Доступны 100 узлов для (предварительной) обработки, фильтрации, сегментации, извлечения признаков, различных представлений (2D, 3D) и т. Д., А также интеграции для различных других инструментов обработки изображений (см. Используемые и интегрированные библиотеки)
Будущие направления включают полную двунаправленную интеграцию ImageJ2. Такая интеграция позволяет пользователям напрямую использовать / обновлять плагины ImageJ2 внутри KNIME, а также записывать и запускать рабочие процессы KNIME в ImageJ2.Пожалуйста, см. Интеграцию ImageJ2 (БЕТА) для получения дополнительной информации.
Такая интеграция позволяет пользователям напрямую использовать / обновлять плагины ImageJ2 внутри KNIME, а также записывать и запускать рабочие процессы KNIME в ImageJ2.Пожалуйста, см. Интеграцию ImageJ2 (БЕТА) для получения дополнительной информации.
Вот доступные расширения обработки изображений KNIME:
Обзор
Начало работы
Установка
Внутренние ресурсы
Внешние ресурсы
Примеры рабочих процессов
Вы можете просмотреть примеры рабочих процессов, связанных с обработкой изображений KNIME, на KNIME Hub.Там вы найдете примеры приложений и руководства, включая информацию о содержании рабочего процесса и о том, как запустить рабочий процесс.
Используемые и интегрированные библиотеки
Интеграция ImageJ и OMERO организована в виде дополнительных плагинов (также доступных на сайте обновлений вклада сообщества). См. ImageJ и OMERO для получения более подробной информации о соответствующей интеграции.
См. ImageJ и OMERO для получения более подробной информации о соответствующей интеграции.
Если у вас есть предложения, проблемы и т. Д., Пожалуйста, разместите сообщение в категории Обработка изображений на нашем форуме! Мы рады помочь вам в этом.
Лицензия
Узлы обработки изображений KNIME выпускаются под лицензией GPLv3.
Обработка изображений — поддержка KeyCDN
Наша мощная функция обработки изображений в реальном времени преобразует и оптимизирует ваши изображения с помощью простых параметров запроса. Ваш рабочий процесс управления изображениями определяет взаимодействие с пользователем, трансформируя и оптимизируя доставку изображений для любого браузера. Обрабатывайте образы на лету, чтобы создать несколько вариантов и доставить их из нашей высокопроизводительной CDN.
Эта функция доступна как для зон извлечения, так и для зон выталкивания. Просто установите для параметра обработки изображений значение включено . Когда для параметра обработки изображений установлено значение
Когда для параметра обработки изображений установлено значение включено в зоне извлечения, параметры Origin Shield и Cache Key Host будут установлены на включен , а параметр Игнорировать строку запроса будет установлен на отключен автоматически.
Если эта функция включена, можно одновременно обрабатывать изображения и доставлять другой контент.При включении будут добавлены заголовки ответов x-ip и x-ip-info . Заголовок ответа x-ip указывает статус операции. Если значение равно 0 , запрос не был обработан (например, CSS или JavaScript). Если значение равно 1 , запрос был обработан. Заголовок ответа x-ip-info указывает результат обработанного запроса. Значение osz указывает размер вывода, значение odim указывает размеры вывода, а значение ofmt указывает формат вывода. В настоящее время поддерживаются форматы изображений
В настоящее время поддерживаются форматы изображений jpeg , png , webp и tiff .
отключен .| Параметр | Значение | Зависимости | По умолчанию | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
обрезка обрезка | 0 — 100 целое число | умный урожай = {ширина, высота} | 0 — 4000 целое число (пикселей) для ширины, высоты, x, y, fp- x, fp-y 0 — 1 float (соотношение базового изображения) для fp-x, fp-y 0 — 100 целое число (коэффициент масштабирования) для fp-z | smart , fp , fpd требуется ширина и высота | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ширина изменить размер | 903 12 ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
высота изменение размера | 0 — 10000 целое число (пиксели) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
крышка , содержат , заливка , внутри или снаружи строка | ширина и высота | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
позиция вправо, | подходит из крышка или содержат или содержат | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
увеличить изменить размер | 0 9024 9024 или | 0 1 9024 9024 или 9 или высота | 1 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
bg = {hex} bg = {r, g, b} bg = {r, g, b, a} изменить размер, расширить | 000000 - ffffff шестнадцатеричный 0,0,0,0. - 255,255,255,1,0 RGB с дополнительным альфа-каналом | удлинить или соответствовать из содержат | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
удлинить = {padding} удлинить = {вверху, справа, внизу } удлинить | 0 - 1000 целое число (пиксели) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
повернуть составить | -359 - 359 градусов (целое число) 9325 flip compose | 0 or 1 boolean | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
flop compose | 0 или 1 9325 0 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
размытие составить | 90 248 0.3 - 100 с плавающей запятой | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
гамма составить | 0 - 3 с плавающей точкой | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
нормализовать составить | 0 или 1 логическое | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
пороговое значение целое 9249
|
 0
0 
 keycdn.com/example.jpg ? Crop = 600,400
keycdn.com/example.jpg ? Crop = 600,400 
 keycdn.com/example.jpg ? width = 400 & height = 400 & fit = contain & position = top
keycdn.com/example.jpg ? width = 400 & height = 400 & fit = contain & position = top  jpg ? width = 730 & Увеличить = 0
jpg ? width = 730 & Увеличить = 0 


 keycdn.com/keycdn-logo-black.svg
keycdn.com/keycdn-logo-black.svg 
 keycdn.com/keycdn-logo-black.svg&olalign=bottomleft&olpadding=100
keycdn.com/keycdn-logo-black.svg&olalign=bottomleft&olpadding=100 
 12.2019 · Кристоф Далиц,
Йенс Вильберг,
Мануэль Ельч Как уменьшить обнаружение аномалий в изображениях до обнаружения аномалий в шуме
12.2019 · Кристоф Далиц,
Йенс Вильберг,
Мануэль Ельч Как уменьшить обнаружение аномалий в изображениях до обнаружения аномалий в шуме  08.2019 · Pascal Monasse Гештальтическая группировка линейных сегментов
08.2019 · Pascal Monasse Гештальтическая группировка линейных сегментов  · Рафаэль Громпоне фон Джой,
Жереми Якубович,
Жан-Мишель Морель,
Грегори Рэндалл Алгоритм морфологических змей в реальном времени
· Рафаэль Громпоне фон Джой,
Жереми Якубович,
Жан-Мишель Морель,
Грегори Рэндалл Алгоритм морфологических змей в реальном времени  Однако для обработки цифрового изображения выводом может быть изображение или информация, связанная с этим изображением, например данные об особенностях, характеристиках, ограничивающих прямоугольниках или масках.
Однако для обработки цифрового изображения выводом может быть изображение или информация, связанная с этим изображением, например данные об особенностях, характеристиках, ограничивающих прямоугольниках или масках.

 Процесс разработки глубокого обучения включает в себя полный цикл операций от сбора данных до включения разработанной модели ИИ в конечную систему.
Процесс разработки глубокого обучения включает в себя полный цикл операций от сбора данных до включения разработанной модели ИИ в конечную систему. Здесь очень полезны алгоритмы искусственного интеллекта и машинного обучения (ML).
Здесь очень полезны алгоритмы искусственного интеллекта и машинного обучения (ML). Обнаружение кромок Canny, обнаружение кромок Собеля и обнаружение кромок Робертса - одни из самых популярных методов обнаружения кромок.
Обнаружение кромок Canny, обнаружение кромок Собеля и обнаружение кромок Робертса - одни из самых популярных методов обнаружения кромок. Существует несколько библиотек с открытым исходным кодом, которые можно использовать при разработке функций обработки изображений и компьютерного зрения:
Существует несколько библиотек с открытым исходным кодом, которые можно использовать при разработке функций обработки изображений и компьютерного зрения: Этот набор инструментов позволяет создавать портативные и высокопроизводительные приложения для систем Windows, Linux и Mac OS X. Поскольку многие классы библиотеки визуализации имеют интуитивно понятное взаимно однозначное сопоставление с функциями и возможностями библиотеки OpenGL, с этим промежуточным программным обеспечением легко и удобно работать.
Этот набор инструментов позволяет создавать портативные и высокопроизводительные приложения для систем Windows, Linux и Mac OS X. Поскольку многие классы библиотеки визуализации имеют интуитивно понятное взаимно однозначное сопоставление с функциями и возможностями библиотеки OpenGL, с этим промежуточным программным обеспечением легко и удобно работать. Ниже мы рассмотрим некоторые из самых популярных из них:
Ниже мы рассмотрим некоторые из самых популярных из них:
 Сервис основан на Jupyter Notebooks, что позволяет разработчикам ИИ делиться своими знаниями и опытом в удобной форме.Плюс, в отличие от аналогичных сервисов, Colab предоставляет бесплатные ресурсы GPU.
Сервис основан на Jupyter Notebooks, что позволяет разработчикам ИИ делиться своими знаниями и опытом в удобной форме.Плюс, в отличие от аналогичных сервисов, Colab предоставляет бесплатные ресурсы GPU.
 В этих сетях нейроны организованы и связаны аналогично тому, как нейроны организованы и связаны в человеческом мозге. В отличие от других нейронных сетей, CNN требуют меньшего количества операций предварительной обработки. Кроме того, вместо использования фильтров, созданных вручную (несмотря на то, что они могут извлечь из них пользу), CNN могут изучать необходимые фильтры и характеристики во время обучения.
В этих сетях нейроны организованы и связаны аналогично тому, как нейроны организованы и связаны в человеческом мозге. В отличие от других нейронных сетей, CNN требуют меньшего количества операций предварительной обработки. Кроме того, вместо использования фильтров, созданных вручную (несмотря на то, что они могут извлечь из них пользу), CNN могут изучать необходимые фильтры и характеристики во время обучения.

 Основное различие между CNN и FCN заключается в том, что последний имеет сверточный слой вместо обычного полносвязного слоя. В результате FCN могут управлять различными размерами входных данных. Кроме того, FCN используют понижающую дискретизацию (полосатую свертку) и повышающую дискретизацию (транспонированную свертку), чтобы сделать операции свертки менее затратными в вычислительном отношении.
Основное различие между CNN и FCN заключается в том, что последний имеет сверточный слой вместо обычного полносвязного слоя. В результате FCN могут управлять различными размерами входных данных. Кроме того, FCN используют понижающую дискретизацию (полосатую свертку) и повышающую дискретизацию (транспонированную свертку), чтобы сделать операции свертки менее затратными в вычислительном отношении. Поэтому неудивительно, что U-Net превосходит Mask R-CNN, особенно в таких сложных задачах, как обработка медицинских изображений.
Поэтому неудивительно, что U-Net превосходит Mask R-CNN, особенно в таких сложных задачах, как обработка медицинских изображений.
 Прогресс во внедрении обработки изображений на основе AI впечатляет и открывает широкий спектр возможностей в областях от медицины и сельского хозяйства до розничной торговли и правоохранительных органов.
Прогресс во внедрении обработки изображений на основе AI впечатляет и открывает широкий спектр возможностей в областях от медицины и сельского хозяйства до розничной торговли и правоохранительных органов.
 Но почему? Это не очень СУХОЕ, не так ли?
Но почему? Это не очень СУХОЕ, не так ли? исходный файл)
.resize_to_limit (400, 400)
.convert ("png")
.вызов
обработано # => #
исходный файл)
.resize_to_limit (400, 400)
.convert ("png")
.вызов
обработано # => #  resize_to_limit! (400, 400) # метод взрыва
resize_to_limit! (400, 400) # метод взрыва  jpg"))
ImageProcessing :: Vips.source (Vips :: Image.new_from_file ("source.jpg"))
jpg"))
ImageProcessing :: Vips.source (Vips :: Image.new_from_file ("source.jpg"))