
Постобработка что это: Недопустимое название — Викисловарь
Обработка спутниковых фазовых измерений — Trimble
4. ОБРАБОТКА СПУТНИКОВЫХ ФАЗОВЫХ ИЗМЕРЕНИЙ Обработка геодезических измерений — это этап работы, следующий за выполнением измерений. Результатом обработки является готовая продукция: каталог координат пунктов геодезической сети, цифровая карта, геоинформационная система региона или объекта. Здесь сделаем акцент на создании каталога координат. Это — важная задача; от того, насколько эффективно она решена, зависит возможность решения всех последующих задач. В GPS процедура обработки компьютеризована. Программное обеспечение «скрывает» некоторые процедуры от пользователя. Вместе с тем активное вмешательство пользователя в процедуру обработки необходимо.При обработке геодезических измерений используют коррелатный и параметрический методы. В GPS используют параметрический метод. При этом подходе прежде всего необходимо составить уравнение, связывающее измеряемую величину с определяемыми параметрами. В спутниковой геодезии измеряемые величины и определяемые параметры связаны основным соотношением, иллюстрируемым рисунком.
Будучи записанным в векторном виде, это соотношение имеет вид (4):
В этом выражении R — геоцентрический вектор пункта Р; ρ — топоцентрический вектор спутника S; r — геоцентрический вектор спутника. Геоцентрический вектор спутника получают из его эфемерид. Геоцентрический вектор пункта является тем, что необходимо получить, работая в навигационном режиме. При выполнении геодезических измерений получают разность геоцентрических векторов пунктов. Будучи по геометрической сути системой дальномерной, GPS позволяет из измерений получать длину вектора ρ, то есть его модуль r. Уравнение (4) принимает вид (5):
Именно это соотношение используют при обработке результатов измерений. Для этого его выражают в координатной форме, линеаризуют и выполняют все остальные процедуры, предусмотренные совершенным механизмом способа наименьших квадратов. Спутниковые измерения имеют много общего с другими геодезическими методами. Есть, однако, и особенности. Проявляются они на этапе постобработки и при разрешении многозначности фазовых измерений.
4.1. Постобработка На этом этапе работ разрешают многозначность фазовых измерений и вычисляют вектор базы в WGS 84. Другими словами, вычисляют компоненты вектора, соединяющего пункты, на которых установлены приёмники.
При правильной организации работы на объекте наблюдатели (операторы) выполняют первичную обработку данных сразу вслед за выполнением измерений. Оператор, прибыв после наблюдений на базу (в камеральное помещение, в офис) и поставив на зарядку аккумуляторы, приступает к постобработке. Задача состоит в том, чтобы выяснить, успешными ли были наблюдения прошед- шего дня и насколько полученные результаты согласуются с тем, что было сделано ранее. При выявлении проблем вносят корректировки в планы на следующий день.
Зарегистрированные приемниками данные (необработанные данные, сырые данные, raw data) скачивают в офисный компьютер. Программное обеспечение таково, что оно может контролировать действия оператора и корректность вводимой информации. Говорят, что аппаратура обладает «защитой от дурака» — fool proof.
Обработав очередную базу, оператор выясняет, как результат согласуется с исходными данными и с результатами, полученными им ранее. Речь идет о том, как согласуются полученные разности координат с каталожными разностями координат исходных пунктов и каковы координатные невязки замкнутых фигур. Как сказано ранее, согласование результатов спутниковых измерений с созданными ранее сетями создает проблемы. Что касается невязок замкнутых фигур, то векторная сумма баз должна быть равна нулю.
Существенное отклонение от этого условия свидетельствует о низкой точности или о грубых ошибках в результатах. Не существует инструкции, оговаривающей допуски, поэтому данный вопрос решают, исходя из личного опыта. Основное время при постобработке занимает разрешение многозначности.
4.2. Многозначность, разности фазовых измерений Эти два вопроса рассмотрим на основе формулы (1). Существуют две проблемы: разрешение многозначности и учет начальных фаз δφ? и δφr колебаний генераторов спутника и приемника. Приемник не только измеряет разность фаз φ(t), но непрерывно регистрирует результат этого измерения. Такая процедура называется счетом целых фазовых циклов. В наземных системах счет идет достаточно медленно: единицы циклов в секунду или в минуту. В спутниковой системе приемник считает тысячи циклов в секунду.
Существуют сбои в счете и это — отдельная проблема. В целом многозначность разрешают способом, во многом аналогичном способу радиолага и способу фазового зонда, используемым в наземных системах. Отличие в том, что расстояние до спутника в начальный момент измерений в спутниковой системе с достаточной точностью знать нельзя. Сюда примешиваются проблемы, связанные с неопределенностью начальных фаз. Если впрямую использовать уравнение (1), то нет основания округлять приближенно определенное значение Nў до ближайшего целого числа, как это делают в дальномерах. И кроме того, если при наземных измерениях наблюдатель имеет достаточно времени для разрешения многозначности, при спутниковых измерениях многозначность необходимо разрешить «мгновенно», быстрое перемещение спутника не дает возможности повтора. Проблемы этим не ограничиваются. Напомним, что GPS создавалась как навигационная кодовая система, изначально не предназначенная для фазовых измерений. В ней нет стройной сетки частот, специально предназначенной для разрешения многозначности. Все сказанное приводит к тому, что разрешение многозначности — самая большая проблема в спутниковых измерениях. Решить эту проблему удается, формируя разности результатов фазовых измерений.
Отличие в том, что расстояние до спутника в начальный момент измерений в спутниковой системе с достаточной точностью знать нельзя. Сюда примешиваются проблемы, связанные с неопределенностью начальных фаз. Если впрямую использовать уравнение (1), то нет основания округлять приближенно определенное значение Nў до ближайшего целого числа, как это делают в дальномерах. И кроме того, если при наземных измерениях наблюдатель имеет достаточно времени для разрешения многозначности, при спутниковых измерениях многозначность необходимо разрешить «мгновенно», быстрое перемещение спутника не дает возможности повтора. Проблемы этим не ограничиваются. Напомним, что GPS создавалась как навигационная кодовая система, изначально не предназначенная для фазовых измерений. В ней нет стройной сетки частот, специально предназначенной для разрешения многозначности. Все сказанное приводит к тому, что разрешение многозначности — самая большая проблема в спутниковых измерениях. Решить эту проблему удается, формируя разности результатов фазовых измерений.
2. Первая разность спутник-спутник. 3. Первая разность приемник-приемник. 4. Вторая разность первых разностях. Второй случай иллюстрирован рисунком 3. На этапе постобработки программное обеспечение формирует разности фазовых измерений. Другими словами, в первом случае формируют разность фаз сигналов от двух спутников на одном приемнике. Во втором случае формируют разность фаз сигналов от одного спутника на двух приемниках. Это называют первой или одинарной разностью «спутник-спутник» и «приемник-приемник».
Если сформировать разность выражений вида (1) для варианта спутник-спутник, то в разности исключается начальная фаза dφ? колебаний приемника. Если сформировать разность выражений вида (1) для варианта приемник-приемник, то в разности исключается начальная фаза dφ? колебаний спутника. Чтобы исключить и ту и другую начальные фазы, необходимо сформировать вторую или двойную разность. Двойную разность получают, выбрав из результатов данные, полученные из одновременных наблюдений двух спутников двумя приемниками. Этот вариант приведен на рисунке 4. Другими словами: вторая разность — это разность двух первых разностей. При формировании разностей фазовых измерений система перестает быть дальномерной и превращается в разностную. Изоповерхности становятся гиперболоидами и геометрический фактор (угол засечки), как правило, ухудшается. Следует также подчеркнуть, что при формировании разностей выражений вида (1) образуются и разности N. Первая разность содержит разность целых уложений длин волн в расстояниях до спутника. Вторая разность содержит разность целых уложений длин волн, содержащихся в первых разностях.
Если сформировать разность выражений вида (1) для варианта приемник-приемник, то в разности исключается начальная фаза dφ? колебаний спутника. Чтобы исключить и ту и другую начальные фазы, необходимо сформировать вторую или двойную разность. Двойную разность получают, выбрав из результатов данные, полученные из одновременных наблюдений двух спутников двумя приемниками. Этот вариант приведен на рисунке 4. Другими словами: вторая разность — это разность двух первых разностей. При формировании разностей фазовых измерений система перестает быть дальномерной и превращается в разностную. Изоповерхности становятся гиперболоидами и геометрический фактор (угол засечки), как правило, ухудшается. Следует также подчеркнуть, что при формировании разностей выражений вида (1) образуются и разности N. Первая разность содержит разность целых уложений длин волн в расстояниях до спутника. Вторая разность содержит разность целых уложений длин волн, содержащихся в первых разностях.
Вторая разность имеет замечательную особенность. Поскольку во второй разности исключаются начальные фазы колебаний спутника и приемника, то теоретически число уложений длин волн во второй разности действительно является целым. Поэтому есть право при обработке округлять число уложений длин волн до целого числа. Так и делают. Более того — вторые разности — это основа обработки в том смысле, что именно на основе вторых разностей получают окончательные результаты. Самой большой проблемой при этой обработке является разрешение многозначности. Необходимо определить набор целых чисел N0 в начальный момент наблюдений для каждой пары пунктов и для каждой пары спутников, наблюдаемых с этих пунктов. Проблема аналогична задаче радиолага или фазового зонда, но решается она совершенно по-другому. В третьих разностях проблема многозначности не решена, но снята.
Поскольку во второй разности исключаются начальные фазы колебаний спутника и приемника, то теоретически число уложений длин волн во второй разности действительно является целым. Поэтому есть право при обработке округлять число уложений длин волн до целого числа. Так и делают. Более того — вторые разности — это основа обработки в том смысле, что именно на основе вторых разностей получают окончательные результаты. Самой большой проблемой при этой обработке является разрешение многозначности. Необходимо определить набор целых чисел N0 в начальный момент наблюдений для каждой пары пунктов и для каждой пары спутников, наблюдаемых с этих пунктов. Проблема аналогична задаче радиолага или фазового зонда, но решается она совершенно по-другому. В третьих разностях проблема многозначности не решена, но снята.
Третья разность — это разность двух вторых разностей. Геометрия иллюстрирована рисунком 5. В начальный момент времени t1 формируют вторую разность и продолжают непрерывную обработку до момента t2. В разности исключается параметр многозначности N0. Это и означает, что проблема многозначности снимается. Расплачиваться за это приходится тем, что ухудшается геометрия наблюдений, то есть изоповерхности пересекаются под углами, далекими от прямых углов. В результате ошибка определения вектора базы лежит в пределах 1-3 метра. Такая точность неприемлема для геодезии, тем не менее третьи разности в процедуре обработки результатов используют.
В разности исключается параметр многозначности N0. Это и означает, что проблема многозначности снимается. Расплачиваться за это приходится тем, что ухудшается геометрия наблюдений, то есть изоповерхности пересекаются под углами, далекими от прямых углов. В результате ошибка определения вектора базы лежит в пределах 1-3 метра. Такая точность неприемлема для геодезии, тем не менее третьи разности в процедуре обработки результатов используют.
Еще раз напомним, что в геодезии обработку результатов измерений выполняют по способу наименьших квадратов, основанному на составлении и решении системы линейных уравнений. В GPS, также как и в большинстве других геодезических методов, уравнения, связывающие измеряемые величины и определяемые параметры, линейными не явля- ются. На этот случай предусмотрена процедура линеаризации уравнений. Функцию измеренной величины от определяемых параметров раскладывают в ряд Тейлора и ограничиваются членами с первыми частными производными. При этом необходимо знать приближенные значения определяемых параметров и предвычисленное по этим значениям приближенное значение измеряемой величины. Приближенные значения координат вектора базы, используемые впоследствии при окончательном решении по вторым разностям, получают из решения по третьим разностям.
Приближенные значения координат вектора базы, используемые впоследствии при окончательном решении по вторым разностям, получают из решения по третьим разностям.
Существует несколько подходов к составлению пакета программ для обработки результатов измерений. Зачастую алгоритм обработки или его детали пользователю недоступны. Тем не менее, общий подход к обработке состоит в следующем. Программное обеспечение формирует первые разности фазовых измерений, из них формирует вторые разности, а затем — третьи разности. Первое, самое приближенное решение вектора базы получают из кодовых и допплеровских измерений. Уточняют его из решения по третьим разностям; этот уточненный результат используют в качестве приближенного для решения по вторым разностям. Как было сказано, наиболее трудным этапом при обработке по вторым разностям является разрешение многозначности.
4.3. Разрешение многозначности В GPS разрешение многозначности сводится к вычислению параметров многозначности N0 , то есть числа целых уложений длин волн во второй разности для каждой пары пунктов и для каждой пары спутников в начальный момент регистрации результатов. Как было сказано, это напоминает задачу радиолага или фазового зонда в наземных системах. Принципиальное отличие состоит в следующем. В наземных системах имеется возможность определить параметр многозначности, когда носитель начинает движение с пункта, расстояние до которого с опорного пункта известно изначально. В спутниковой системе такая возможность отсутствует. Нет твердого пункта в околоземном пространстве, с которого спутник мог бы начать свое движение. Единственный выход состоит в том, чтобы включить набор параметров многозначности N0 в число определяемых параметров. Другими словами, в уравнивании в качестве неизвестных участвуют помимо координат вектора базы еще и параметры многозначности N0. Отсюда ясна разница между разрешением многозначности в наземных и спутниковых измерениях. При работе с наземным дальномером или с наземной системой оператор (наблюдатель) обязан построить работу так, чтобы определить целое число N безошибочно. Он обязан определить истинное значение N в процессе наблюдений и не может прекратить наблюдения до тех пор, пока не убедится в том, что многозначность разрешена.
Как было сказано, это напоминает задачу радиолага или фазового зонда в наземных системах. Принципиальное отличие состоит в следующем. В наземных системах имеется возможность определить параметр многозначности, когда носитель начинает движение с пункта, расстояние до которого с опорного пункта известно изначально. В спутниковой системе такая возможность отсутствует. Нет твердого пункта в околоземном пространстве, с которого спутник мог бы начать свое движение. Единственный выход состоит в том, чтобы включить набор параметров многозначности N0 в число определяемых параметров. Другими словами, в уравнивании в качестве неизвестных участвуют помимо координат вектора базы еще и параметры многозначности N0. Отсюда ясна разница между разрешением многозначности в наземных и спутниковых измерениях. При работе с наземным дальномером или с наземной системой оператор (наблюдатель) обязан построить работу так, чтобы определить целое число N безошибочно. Он обязан определить истинное значение N в процессе наблюдений и не может прекратить наблюдения до тех пор, пока не убедится в том, что многозначность разрешена. При работе со спутниковой аппаратурой оператор может узнать, разрешена ли многозначность только после постобработки то есть уже прекратив наблюдения. Это утверждение не касается работы в режиме RTK. Более того, в результате разрешения многозначности получается набор вероятнейших значений параметров многозначности, но вовсе не истинные их значения.
При работе со спутниковой аппаратурой оператор может узнать, разрешена ли многозначность только после постобработки то есть уже прекратив наблюдения. Это утверждение не касается работы в режиме RTK. Более того, в результате разрешения многозначности получается набор вероятнейших значений параметров многозначности, но вовсе не истинные их значения.
Разрешение многозначности спутниковых измерений и успех этой процедуры имеет вероятностный смысл. Чем длительнее сессия наблюдений и чем меньше препятствий, закрывающих небосклон, тем больше вероятность успеха. С другой стороны, длительность сессии не может быть непомерно большой. Нет смысла находиться на пункте, скажем, четыре часа, если опыт говорит, что достаточно наблюдать полтора часа. Длительность сессии наблюдений определяет опытный руководитель проекта с учетом мнения опытных операторов. Бывает, что условия наблюдений на каком-либо пункте крайне неблагоприятны, но отнаблюдать его необходимо. Например, пункт находится близ многоэтажного здания, закрывающего половину небосклона. В таких случаях вопрос о длительности сессии на этом пункте решается индивидуально по принципу «чем дольше, тем лучше». Разрешение многозначности выполняет не оператор вручную, а программное обеспечение (soft). Порядок разрешения многозначности следующий. Используя эфемеридную информацию и приближенные координаты вектора базы, вычисляют параметры многозначности N’0. Штрих поставлен потому, что параметры многозначности содержат ошибки и не будут целыми, так, как это должно быть. Округляют параметры многозначности до ближайших целых чисел, получая тем самым набор параметров многозначности N0. Значения этих параметров не будут ни истинными ни вероятнейшими. Получение вероятнейших значений обеспечивает дальнейшая процедура.
В таких случаях вопрос о длительности сессии на этом пункте решается индивидуально по принципу «чем дольше, тем лучше». Разрешение многозначности выполняет не оператор вручную, а программное обеспечение (soft). Порядок разрешения многозначности следующий. Используя эфемеридную информацию и приближенные координаты вектора базы, вычисляют параметры многозначности N’0. Штрих поставлен потому, что параметры многозначности содержат ошибки и не будут целыми, так, как это должно быть. Округляют параметры многозначности до ближайших целых чисел, получая тем самым набор параметров многозначности N0. Значения этих параметров не будут ни истинными ни вероятнейшими. Получение вероятнейших значений обеспечивает дальнейшая процедура.
Используя набор целочисленных параметров многозначности, вычисляют новые координаты вектора базы. Они также ошибочны, поскольку ошибочны значения параметров многозначности. Однако на этом этапе достигается соответствие между параметрами многозначности и координатами вектора базы. Далее наступает этап, занимающий основное время обработки: сканирование. Компьютер последовательно изменяет (увеличивает и уменьшает) на 1,2,.. значения параметров многозначности. Это делают во всех комбинациях, получая каждый раз новое решение для вектора базы. Число комбинаций и решений огромно. Одновременно на основе статистического анализа компьютер оценивает вероятность V справедливости каждого из полученных решений. Он выстраивает решения в иерархию по их вероятности: наиболее вероятному решению приписывает вероятность V1 наиболее вероятному из оставшихся — вероятность V2 и так далее. Завершающим этапом является вычисление отношения — ratio=V1/V2. Смысл в том, чтобы оценить, насколько велика вероятность справедливости первого решения по сравнению с вероятностью справедливости второго решения. Если ratio близко к единице, то есть решения примерно равновероятны, то многозначность не разрешилась и наблюдения на данной базе надо повторить при более благоприятной геометрии наблюдений и при большей длительности сессии.
Далее наступает этап, занимающий основное время обработки: сканирование. Компьютер последовательно изменяет (увеличивает и уменьшает) на 1,2,.. значения параметров многозначности. Это делают во всех комбинациях, получая каждый раз новое решение для вектора базы. Число комбинаций и решений огромно. Одновременно на основе статистического анализа компьютер оценивает вероятность V справедливости каждого из полученных решений. Он выстраивает решения в иерархию по их вероятности: наиболее вероятному решению приписывает вероятность V1 наиболее вероятному из оставшихся — вероятность V2 и так далее. Завершающим этапом является вычисление отношения — ratio=V1/V2. Смысл в том, чтобы оценить, насколько велика вероятность справедливости первого решения по сравнению с вероятностью справедливости второго решения. Если ratio близко к единице, то есть решения примерно равновероятны, то многозначность не разрешилась и наблюдения на данной базе надо повторить при более благоприятной геометрии наблюдений и при большей длительности сессии. При благоприятных условиях наблюдений случается, что ratio близко к сотне. В этом случае операторы уверены в успехе наблюдений на данной базе, хотя окончательное решение принимают, проанализировав распределение по сети невязок замкнутых фигур.
При благоприятных условиях наблюдений случается, что ratio близко к сотне. В этом случае операторы уверены в успехе наблюдений на данной базе, хотя окончательное решение принимают, проанализировав распределение по сети невязок замкнутых фигур.
Постобработка пластика после 3Д-печати: механическая и химическая
3D печать постобработка
Наиболее популярными методами доводки распечатанных 3D-объектов являются шлифовка, пескоструйная обработка и обработка парами растворителей.
Это заблуждение, что при 3D-печати нельзя получить такие же гладкие и отполированные объекты, как с помощью традиционных промышленных технологий. На такие заявления можно возразить простой наждачкой, и эта техника доводки очень распространена.
То, какая техника доводки используется, во многом зависит от геометрии и материала детали. Эти факторы определяют и уровень эстетичности, который удастся достичь, и ее функциональность, потому что разные методы позволяют добиваться разных текстур и внешнего вида. Одни методы лучше подходят для прототипов и выставочных моделей, другие – для деталей механизмов.
Постобработка шкуркой
Ошкуривание позволяет устранить недостатки 3Д печати. Большинству изделий 3Д принтера для придания гладкости и для того, чтобы избавиться от линий в местах наложения слоев, достаточно доводки наждачной шкуркой.
Как пользоваться шкуркой, все знают. Берётся небольшой кусок шкурки, изделие и механическими шлифовальными движениями осуществляется обработка. Сам процесс – эффективен и не дорог.
Ограничений на постобработку нождачкой не так много. Главное, чтобы изделие не было слишком маленьким.
Главное, чтобы изделие не было слишком маленьким.
Пескоструйная постобработка
Следующим по распространённости постобработки изделий является пескоструйная обработка. Оператор направляет сопло с распыляемым мелкодисперсным материалом. Процесс недолгий и занимает всего 5 – 10 минут. Результат получается цельной гладкой.
Технологию можно легко преобразовать и использовать совершено различные материалы. Технология может быть применена на любом этапе производства изделия. Гибкость технологии обусловлена тем, что для обработки изделия используются мельчайшие частицы.
Главное ограничение «пескоструя» — это размеры объекта. Процесс проводится в закрытой камере габаритами 60 x 80 x 80 см – это и есть основное ограничение. Так же, следует отметить, что за раз вы можете обработать только одну деталь.
Постобработка парами
Самый последний по популярности метод постобработки – это обработка паром. Деталь помещается в атмосферу испаряемого вещества. Частицы испарений вплавляются в поверхность изделия примерно на 2 микрона, делая её гладкой и блестящей за мгновение. Однако, стоит отметить, что если вы любите матовую поверхность, то вам лучше после обработки парами провести дополнительно пескоструйную обработку.
Деталь помещается в атмосферу испаряемого вещества. Частицы испарений вплавляются в поверхность изделия примерно на 2 микрона, делая её гладкой и блестящей за мгновение. Однако, стоит отметить, что если вы любите матовую поверхность, то вам лучше после обработки парами провести дополнительно пескоструйную обработку.
Метод паровой обработки не сильно сказывается на точности детали. Поверхность получается гладкой и поэтому, данный метод широко применяется в прототипах, медицинских положениях.
Основное ограничение – габариты и материалы Для обработки ABS-пластика используется ацетон. При обработке PLA-пластика используется тетрагидрофуран или дихлорметан. Обработанные материалы достаточно практичны и прочны, созданные изделия сохраняют свою изначальную прочность и гибкость.
Где вы берёте STL-модели для печати?
Видео по теме:
 youtube.com/embed/TYGaZkY3FWU» frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»/>
youtube.com/embed/TYGaZkY3FWU» frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»/>
Create high-quality visuals in Unity with the Post-Processing Stack
Три лучших ресурса
Документы и краткие руководства
Самая последняя версия стека наряду с удобным кратким руководством, доступна в GitHub или посредством менеджера пакетов.
Из блога: великолепные визуальные результаты, обновлено
Джош написал в блоге, в котором представлен детальный обзор новейших функций, как их настраивать, как использовать их с другими системами, таким как Timeline и Cinemachine, и использовать их в мобильном контенте. Обязательно к прочтению перед использованием.
Как применять эффекты, шаг за шагом
Джош также выступил на конференции Unite, где он шаг за шагом показал, как включать и применять эффекты. Он использовал показанную ниже сцену, взятую из Asset Store: прекрасно выглядящую сцену с высококачественными текстурами и хорошим освещением. Добавляя эффекты постобработки, он поднял ее с уровня «хорошая» до уровня «великолепная». Требовалось совсем немного программирования — только для облета камеры, что можно проделать с треком анимирования или с треком Cinemachine.
Он использовал показанную ниже сцену, взятую из Asset Store: прекрасно выглядящую сцену с высококачественными текстурами и хорошим освещением. Добавляя эффекты постобработки, он поднял ее с уровня «хорошая» до уровня «великолепная». Требовалось совсем немного программирования — только для облета камеры, что можно проделать с треком анимирования или с треком Cinemachine.
В первой части своего выступления он рассказывает о том, как настраивать глобальный профиль, как переопределять глобальный профиль при необходимости, как применять индивидуальные профили постобработки, и как смешивать профили (все это очень легко!).
Во второй части своего выступления он объясняет, как подходить к этим эффектам с точки зрения кинематографа и как отлаживать их. Эта часть его выступления начинается с отметки 22:00.
Наконец, если вы этого еще не сделали, загляните в Unity Hub. Оттуда вы сможете загрузить все новейшие версии Unity, бета-версии и множество учебных материалов. Вы также найдете там различные шаблоны, не только для 2D- или 3D-проектов, но и шаблоны для новых программируемых процессов рендеринга, а также пример проекта, в котором используются некоторые пакеты, такие как стек постобработки.
Вы также найдете там различные шаблоны, не только для 2D- или 3D-проектов, но и шаблоны для новых программируемых процессов рендеринга, а также пример проекта, в котором используются некоторые пакеты, такие как стек постобработки.
Фотофокус 3. Съемка в сложных условиях, постобработка.: chistoprudov — LiveJournal
Третий пост воскресной рубрики Ильи Варламова сегодня опубликую я.Наверное, многие фотографы, снимающие с крыш домов или строящихся зданий, не раз сталкивались с такой проблемой, когда различные провода, антенны, трубы или строительных хлам мешают получить «чистый» кадр. Иногда небольшая ретушь позволяет избавиться от этого мусора, но бывает и так, что сделать это довольно сложно. Скорее это не «фотофокус», а небольшая «фотохитрость», которой я часто пользуюсь, если в кадр лезет такая большая ерунда, как на фотографии ниже:
1.
Рассмотрим кадр поближе: 1 — антенна (наш главный враг), 2 — провода, 3 — дребезжащая на ветру хрень, 4 — блики.
2. Чтобы схитрить и убрать ненужный хлам, я делаю два кадра. Первый кадр снимаю с того же места, где и стоял штатив. С пунктом 3 (дребезжащая на ветру хрень) разбираюсь сразу — дотягиваюсь до нее рукой и пригибаю за приделы кадра. Это самый лучший вариант борьбы с мусором.
3. Дальше я сдвигаю штатив на двадцать сантиметров влево и делаю еще один кадр. Визуально ничего почти не поменялось, только исчезли паразитные блики, видимо, от смещения штатива лучи прожектора подсветки здания перестали попадать в объектив. Прекрасно, это позволит мне легко разабраться с бликами.
4. В итоге мы получили два кадра с разным положением антенны и проводов. Собственно вот и вся хитрость. Дальше — дело техники.
5. Загоняем оба кадра в один файл Фотошопа, верхний слой делаем прозрачным на 50% и накладываем его на второй слой так, чтобы они слились в один.
6.
Дальше нужно выровнять кадры по наклону. Устанавливаем центр вращения в «эпицентре мусора».
7. На другом крае кадра хорошо видны последствия съемки со смещением.
8. Я выравниваю только угол наклона. Добиться идеального смещения кадров не удастся, так как у них разные точки съемки.
9. Дальше начинается работа «заплатчика». Я выделяю кусок провода вместе с бликом над футбольным полем на первом слое.
10. Перехожу на второй слой и вижу, что тут все чисто. Копирую этот участок.
11. Вставляю полученный кусок на первый слой и затираю резкий переход.
12. Чтобы хорошо было видно, где именно проходит новый участок, я периодически инвертирую цвета.
13. Первый провод убран. Выделяю соседний блик с небольшим запасом.
14. В уровнях уменьшаю его яркость и потом затираю резкие края.
15. Провод и нижний блик убраны, дальше я берусь за антенну.
16. Сначала я убираю безобидные антенные усики инструментами «Clone Stamp» и «Healing brush».
17. Вот, что получается.
Вот, что получается.
18. Выделяю остатки антенны и блик-паразит.
19. На втором слое все почти чисто, копирую этот участок.
20. Аккуратно затираю резкие края и ретуширую оставшийся мусор.
21. C последним фрагментом антенны поступаю аналогично.
22. Готово.
23. Осталось победить этот блик. Выделяю его область и копирую этот участок с другого слоя, где блика нет.
24. Теперь с мусором покончено, можно выровнять перспективу, откадрировать…
25. … и чистый кадр готов. На всю работу у меня ушло минут 12-15.
В случае, если до всех проводов можно дотянуться рукой и тем самым подвигать антенну, то задача намного упростится. Нужно будет сделать несколько кадров с одного места и потом подтереть ненужные участки. В этом случае проблем с наложением кадров не возникнет и возьни будет меньше.
Спасибо raskalov_vit за съемку и varlamov.ru за компанию!
Предыдущие серии Фотофокусов:
1. Эксперименты с диафрагмой.
Эксперименты с диафрагмой.
2. Снимаем без объектива.
Каталог всех моих записей.
Постобработка рабочих процессов для наружной детской фотографии
Во время сеанса
Для съемки на улице у вас будет гораздо больше переменных, которые нужно учитывать при съемке самой фотографии. Получите это прямо в камере. Проверяйте гистограмму каждый раз, когда меняется освещение. Хотя экспонирование на темной стороне лучше, чем на свету, это то, что могло бы быть улучшено при съемке фотографии и может вернуться к вам во время поста. При взгляде на гистограмму вылетели бы красные флажки.
Работая на открытом воздухе, вы также будете иметь много общего с окружающей средой, с которой вам не придется иметь дело в студии. Если вы используете приличное количество MP (15+), отступите назад и получите немного больше передышки вокруг объекта. Это даст вам возможность обрезать, как только вы получите сообщение. Часто на изображении вы обнаруживаете что-то, что вы не понимали, было ли оно включено или обрезано, и всегда безопаснее включить в фотографию больше, чем меньше.
Послепроизводственный этап
Во-первых, баланс белого. Если у вас нет 18% серой карты, найдите баланс нейтрального цвета к белому. Лучшее решение — снимать в сыром виде, чтобы вы могли сделать это в посте. Далее будет экспозиция. Правильно выставьте объект в первую очередь, не беспокойтесь о фоне. Затем вы можете перейти к таким элементам, как насыщенность, контрастность, кривые, блики, тени и т. Д. Выберите тот, который вам нравится, и переходите к следующему. Они будут влиять друг на друга, чтобы вы могли вернуться.
Для младенцев многие фотографы слегка снижают насыщенность и четкость, но это зависит от ваших предпочтений. У вас очень занятой фон, поэтому вы можете подумать о некотором размытии фона, так как боке не получилось сильным. Как предложила @ElendilTheTall, виньетка вызвала бы предмет больше.
Почти каждый артист пост-продакшн работает с глазами. Вы не захотите получить от них немного цвета и немного осветлить. Кисть с насыщенностью, экспозицией, четкостью и контрастностью может пройти долгий путь. Lightroom поставляется с одним, который является отправной точкой, но не доставляет его домой из коробки. Белый цвет глаз тоже нужно почистить.
Lightroom поставляется с одним, который является отправной точкой, но не доставляет его домой из коробки. Белый цвет глаз тоже нужно почистить.
Последний шаг, который вы должны сделать, это заострить. Даже если вам хочется нежного мечтательного взгляда, хорошая нерезкая маска действительно может помочь.
Если это изображение в формате RAW, я чувствую, что это можно спасти. Единственное беспокойство — темнота глаз. Даже тщательно использованная встроенная вспышка может изменить глаза.
Несмотря на это, клиент, вероятно, будет любить его. Их самое большое беспокойство — это выражение выражений и привлекательности в хорошей картине. Отличное качество поста для них вторично. Не дать вам выход, просто пытаюсь снять стресс.
Время поствызывной обработки | Виртуальная АТС Октолайн
Описание
Время поствызывной обработки – это время, которое может понадобиться оператору на совершение некоторых необходимых процедур, связанных с только что завершенным разговором с клиентом. Например, ему нужно написать отчет с указанием результата разговора и именем клиента. В это время звонки оператору поступать не будут.
Например, ему нужно написать отчет с указанием результата разговора и именем клиента. В это время звонки оператору поступать не будут.Зачем
Для того, чтобы после завершения разговора с клиентом оператор мог спокойно написать отчет, не отвлекаясь на другие звонки, ему не нужно каждый раз менять статус своего рабочего места на «Технический перерыв» и обратно «Ожидаю звонок» — Октофон автоматически переводится в режим поствызывной обработки и по истечении заданного времени выходит из него. При этом вы можете сами задавать то время, которое считаете достаточным для того, чтобы оператор успел обработать и записать данные в своем отчете.Как это работает
Октолайн на основе данных от Октофона (статус «В перерыве», «Отошел», «Работает» и пр.), настроек группы операторов, информации о текущих сессиях (звонках) и ряда других параметров имеет постоянно обновляемый список свободных операторов, которым будут переведены следующие поступившие звонки. Одним из параметров, определяющим, свободен оператор или нет, является функция «Время поствызывной обработки». Время поствызывной обработки начинает отсчитываться сразу после того, как закончен сеанс разговора с клиентом. На это время оператор считается занятым (предполагается, что он записывает результаты разговора, заносит сведения о клиенте в базу данных и пр.), и звонки ему не переводятся. По истечении времени поствызывной обработки оператор автоматически возвращается в список свободных операторов.
Время поствызывной обработки начинает отсчитываться сразу после того, как закончен сеанс разговора с клиентом. На это время оператор считается занятым (предполагается, что он записывает результаты разговора, заносит сведения о клиенте в базу данных и пр.), и звонки ему не переводятся. По истечении времени поствызывной обработки оператор автоматически возвращается в список свободных операторов.Как начать пользоваться
Функцию «Время поствызывной обработки» можно настроить в панели администратора при создании новой группы: либо при редактировании параметров группы на вкладке «Управление доменом/Пользователи/Параметры группы»: В строке «Время поствызывной обработки» введите то время (в секундах), которое считаете достаточным для того, чтобы оператор успел ввести данные об обслуженном звонке (по умолчанию указано 60 секунд). Если вы хотите отключить эту функцию, введите нуль. Не забудьте нажать «Сохранить». Данная функция настраивается для каждой группы отдельно. Таким образом, после окончания разговора с клиентом рабочее место оператора Октофон будет автоматически переведено в режим «Поствызывная обработка». Если оператор закончит вводить сведения о звонке до того, как истекло данное ему время, он может вернуться к работе, нажав кнопку «Готов к работе». Иначе по истечении установленного времени рабочее место оператора автоматически будет переведено в режим «Ожидаю звонок».
Если оператор закончит вводить сведения о звонке до того, как истекло данное ему время, он может вернуться к работе, нажав кнопку «Готов к работе». Иначе по истечении установленного времени рабочее место оператора автоматически будет переведено в режим «Ожидаю звонок».Способы обработки кофе
Первоначально обработка кофе была лишь способом извлечь зерна из кофейных ягод. Производители использовали тот метод обработки, который позволяет производить кофе в их климатических условиях, а про вкус особо никто не думал.
Однако позже стало ясно, что обработка кофе сильно влияет на вкус чашки. Например, при одинаковых условиях выращивания и приготовления кофе мытой обработки получится более кислотным, чем кофе натуральной.
Именно поэтому важно понимать, в чём отличия между разными способами обработки, и разбираться в том, как они влияют на вкус. Об этом и будет наша статья.
Способы обработки кофейных ягодЯгода состоит из шести слоев — кожица, мякоть, клейковина, пергаментная оболочка (пачмент), серебряная кожица (сильверскин) и зерно. Каждый из них выполняет свою функцию: защищает от солнца или повреждений, дает питание. При обработке кофе подвергаются изменениям первые четыре слоя.
Каждый из них выполняет свою функцию: защищает от солнца или повреждений, дает питание. При обработке кофе подвергаются изменениям первые четыре слоя.
В зависимости от количества оставшихся слоев различают четыре базовых метода обработки:
-
Сушка в ягоде, при котором ягода сушится полностью. Этот метод также называется натуральным или сухим.
-
Сушка в клейковине, при котором ягода сушится без кожицы и убирается часть мякоти. Один из самых запутанных способов, так как имеет множество вариаций и может называться хани, палп-нэчурал, полумытым или полусухим.
-
Сушка в пачменте, при котором удаляется кожица, мякоть, клейковина, зерно сушится в пачменте. Этот способ называется мытым.
-
Сушка зерна, при котором удаляется кожица, мякоть и пачмент.
 Этот способ называется вет-халл.
Этот способ называется вет-халл.
 Этот способ называется вет-халл.
Этот способ называется вет-халл.Чаще всего метод обработки выбирают в зависимости от погодных условий. Если климат сухой, жаркий — можно обработать кофе натуральным способом. Такой способ также используют из-за низкой стоимости или ограниченного количества воды, например, в Эфиопии, Йемене и Бразилии.
Остальные методы обработки чаще применяют во влажном климате. Они позволяют высушить зерна быстрее и избежать порчи урожая.
Сушка в ягоде, или натуральная обработка: почему кофе получается более сладким
Натуральная обработка — самый древний способ извлечения зерна из ягоды
Сушка в ягоде — классический способ обработки кофейного зерна. Его использовали с самого начала производства кофе.
Тогда кофе производили в Эфиопии и Йемене, где сухой климат и нет затяжного сезона дождей. Благодаря этому, кофейные ягоды хорошо сушились на открытом воздухе. Так обрабатывали весь кофе, пока он не распространился по колониям европейцев.
Так обрабатывали весь кофе, пока он не распространился по колониям европейцев.
При натуральной обработке фермеры сушат кофейные ягоды на патио — бетонных площадках или африканских кроватях — специальных столах с сеткой. Обычно это занимает до четырех недель. На некоторых фермах используют специальные машины для сушки, в которые загружают ягоды после нескольких дней на солнце.
Ягода сохнет вместе с зерном, сахара из мякоти и клейковины остаются в зерне. Поэтому при одинаковом терруаре, обжарке и приготовлении натуральная обработка придает кофе более плотное тело и более высокую сладость.
В одно время натуральный способ обработки потерял свою популярность. И даже ассоциировался с дешевым кофе, потому что дешевое зерно чаще обрабатывали именно так. А отсутствие внимания к процессу обработки приводило к еще большим дефектам.
Сейчас натуральный способ обработки снова широко используют. Индустрия спешелти кофе фокусируется на вкусе, а натуральная обработка может давать очень яркий вкус и высокие оценки в каппинге, если проведена качественно.
В результате натуральной обработки получаются высушенные ягоды, которые еще некоторое время хранят в специальных силосах, чтобы стабилизировать вкус и водную активность. Затем, перед отправкой покупателю, высушенные ягоды отправляются на халлинг, где их отшелушивают и извлекают зеленые зерна и упаковывают в экспортную упаковку.
|
Преимущества |
Недостатки |
|
Яркий вкус. Более дешевый метод в сухом и жарком климате. Не оставляет сточных вод. |
Перед сушкой нужно отделить незрелые ягоды. При сушке нужно часто перемешивать, Не подходит для стран-производителей с влажным климатом. |
Как еще может называться этот способ: натуральный, сухой, немытый, natural, dry, fruit dried, sun dried, unwashed.
Остатки мякоти придают зерну разные оттенки — от светло-желтого до практически черного
Сушка в клейковине делится на две основные группы — хани и полумытый способ. Они очень похожи, однако есть отличия.
Хани — это способ обработки, при котором удаляется кожица и часть мякоти. Такие ягоды при сушке приобретают медовый цвет и становятся липкими. Поэтому способ называется «honey», что означает «мед».
Сразу после сбора урожая фермеры проводят депульпацию — этап обработки кофе, при котором зерна отделяют от кожицы и частично от мякоти. После этого кофе сушат до влажности 10–12 %.
Полумытая обработка или механическое отделение мякоти — отличается от хани обработки тем, что после депульпации кофе отправляется на другую машину — демюсилятор. Машина удаляет мякоть почти полностью, и уже потом зерна отправляются на сушку. То есть ключевое отличие от хани в том, что мякоти на поверхности почти не остается. При этой обработке кофе сушится еще быстрее.
То есть ключевое отличие от хани в том, что мякоти на поверхности почти не остается. При этой обработке кофе сушится еще быстрее.
В результате хани и полумытой обработок получается высушенный пачмент — зерна покрытые последним защитным слоем. Пачмент также еще некоторое время хранят в специальных в силосах, чтобы стабилизировать вкус и водную активность. Затем, перед отправкой покупателю, пачмент отправляется на халлинг, где его отшелушивают, извлекают зеленые зерна и упаковывают в экспортную упаковку.
|
Преимущества |
Недостатки |
|
На сушку зерна требуется меньше времени, по сравнению с натуральным. Дает большую вариативность вкусов. Меньше биологических отходов и сточных вод. Оставшуюся мякоть можно использовать в качестве удобрения. |
Повышенный риск дефектов от механического воздействия. Для полумытой обработки требуется дорогостоящее оборудование — демюсилятор. |

Как еще может называться этот способ: хани, honey, палп-нэчурал, pulp natural, полусухой, semi dried, полумытый, semiwashed, желтый хани, yellow honey, золотой хани, golden honey, белый хани, white honey, красный хани, red honey, черный хани, black honey.
Сушка в пачменте, или мытая обработка: почему она считалась лучше натуральной
Так выглядит кофе в ферментационном танке, залитый водой. © pixabay.com
Сушка в пачменте отличается от сушки в клейковине тем, что мякоть удаляется с помощью ферментации и затем смывается водой.
Этот метод появился, когда европейцы высадили кофейные деревья в своих колониях. В Индонезии, Кубе и Центральной Америке из-за влажного климата было сложно сушить ягоды — урожай мог просто покрыться плесенью. Кроме того, потребление кофе росло, и нужно было придумать, как обрабатывать его быстрее. Поэтому в 1850-х годах британцы в своей колонии на Ямайке изобрели мытый способ обработки.
В Индонезии, Кубе и Центральной Америке из-за влажного климата было сложно сушить ягоды — урожай мог просто покрыться плесенью. Кроме того, потребление кофе росло, и нужно было придумать, как обрабатывать его быстрее. Поэтому в 1850-х годах британцы в своей колонии на Ямайке изобрели мытый способ обработки.
Суть этого метода:
-
Сначала кофейные ягоды очищают от кожицы — депульпируют.
-
Затем их ферментируют. Для этого ягоды оставляют в ферментационном танке с водой или без нее. Бактерии, дрожжи и другие микроорганизмы запускают процесс ферментации и разрушают таким образом мякоть и клейковину на поверхности пачмента.
-
После этого остатки клейковины смывают водой и отправляют кофе на сушку.
Со временем мытая обработка начала вытеснять натуральную: она была единственной, которую можно было контролировать, поэтому кофе получался лучше по качеству. При равных условиях выращивания, одинаковой обжарке и приготовлении такая обработка дает более чистый и кислотный вкус.
При равных условиях выращивания, одинаковой обжарке и приготовлении такая обработка дает более чистый и кислотный вкус.
В результате мытой обработки, также, как и в результате хани и полумытой обработок, получается высушенный пачмент, который отправляют на хранение, чтобы стабилизировать вкус и водную активность. Затем, перед отправкой покупателю, пачмент отправляется на халлинг, где его отшелушивают, извлекают зеленые зерна и упаковывают в экспортную упаковку.
|
Преимущества |
Недостатки |
|
Срок сушки сократился в несколько раз. Требуется меньше места для обработки. Более чистый и кислотный вкус. |
Большое количество сточных вод. |
Как еще может называться этот способ: мытый, полностью мытый, washed, fully washed, влажная обработка.
Особенность обработки вет-халл — сушка зерен без пергаментной оболочки. © bukalapak.com
При сушке зерна, или вет-халле, с ягоды удаляется кожица, мякоть и пачмент.
Сначала ягоды, как при мытом способе, очищают от кожицы, ферментируют в воде и отправляют на сушку.
Главное отличие — зерна сушатся до уровня в 20–24 %, хотя обычно до 10–12 %. Далее еще влажные зерна отправляют на удаление пачмента — халлинг. После удаления пачмента они сохнут быстрее.
В результате обработки вет-халл, в отличие от других обработок, сразу получаются готовые зеленые зерна, которые отправляют на предэскпортную подготовку, сортируют, упаковывают и отправляют покупателям.
|
Преимущества |
Недостатки |
|
Самый быстрый способ сушки зерна. |
Высокий риск дефектов. Более быстрое старение при хранении. |

Как еще может называться этот способ: вет-халл, гилинг-басах.
Почему важно знать способ обработки зернаПри разном способе обработки происходят разные процессы, которые сказываются на вкусе кофе, поэтому так важно их не путать.
Однако стоит помнить, что на вкус кофе также влияет терруар, разновидность кофе, обжарка, качество помола, вода и другие факторы.
5 расширенных ошибок постобработки — CaptureLandscapes
Ранее мы рассматривали ошибки постобработки, допускаемые новичками, но не только начинающие фотографы испытывают трудности с постобработкой. Опытным фотографам тоже приходится нелегко, хотя борьба немного другая.
Давайте посмотрим на 5 наиболее распространенных ошибок расширенной постобработки :
1.
 Добавление слишком большого количества эффектов
Добавление слишком большого количества эффектовЯ понимаю, что вы хотите продемонстрировать свои навыки после изучения новых методов постобработки, но пытаться уместить слишком много в одной фотографии — не лучший способ сделать это.
На самом деле маски яркости, эффект Ортона, световое кровотечение, уклонение и горение не всегда нужны. Некоторым изображениям это выгодно, а другим — нет. Вместо всегда , включая всех техник, которым вы научились, постарайтесь понять , какие изображений от них выигрывают.
Давайте посмотрим на пример. На изображении ниже показано, что , а не выиграют от использования эффекта Ортона и легкого кровотечения. Вместо этого мне нужно было применить больше резкости, чем для изображения с более мягкой поверхностью.
Однако, чтобы выделить цвета и свечение на освещенных участках, я знал, что мне нужно применить Dodging & Burning, а для поддержания холодных теней я работал с целевым цветовым балансом.
Другими словами, каждое изображение выигрывает от другого рабочего процесса или различных настроек. Именно поэтому простое применение предустановок без их дальнейшего изменения не будет работать со всеми изображениями.
2. Пренебрежение угловым контролем
Контроль углов изображения — это то, что вам нужно делать как в полевых условиях, так и при постобработке.Неважно, насколько хороша композиция или насколько хорошо вы обработали изображение; если пренебречь углами, изображение будет отвлекать.
Так что я имею в виду под «контролем угла»?
Контроль над углами означает, что вы удаляете все отвлекающие элементы по краям изображения. Другими словами, удалите все, что отвлекает от основной темы. Это могут быть как физические элементы, так и световые.
Мне потребовалось время, чтобы удалить отвлекающие элементы, такие как палочки, из нижних углов. Используйте инструмент Spot Removal Tool , чтобы удалить ненужные элементы и добавить небольшую виньетку для управления светом. В общем, мы не хотим, чтобы в углах изображения были яркие участки, так как наши глаза естественным образом направляются в эти места.
В общем, мы не хотим, чтобы в углах изображения были яркие участки, так как наши глаза естественным образом направляются в эти места.
3. Не использовать точечное удаление
Ошибка № 3 во многом похожа на предыдущую ошибку, но не только в углах нужно убирать отвлекающие элементы. Слишком часто я вижу художников, которые слишком осторожно удаляют элементы из своих картин.
Я не говорю вам убирать из снимков большие ориентиры, чтобы они выглядели по-другому, но избавляйтесь от этих лежащих вокруг палок или от машины, припаркованной на дороге.Опять же, удалите все элементы изображения, которые не служат цели.
4. Плохое смешивание
Смешивание нескольких изображений для увеличения динамического диапазона (также известного как HDR) — отличный способ преодолеть определенные ограничения камеры. Однако это техника, требующая точности и, самое главное, практики.
Перед тем, как опубликовать картинку, внимательно посмотрите на нее и спросите себя: выглядит ли смесь реалистично? Если вы видите, что это смешано, то и другие тоже.
Некоторые изображения сложнее смешивать, чем другие, а для некоторых могут потребоваться специальные методы смешивания, но заставьте себя изучить эти методы и попрактиковаться в их применении к различным изображениям.
5. Непонимание важности цвета
Это может показаться скучным и трудным для понимания, но теория цвета необходима в фотографии. Хотя в пейзажной фотографии это сложнее контролировать (поскольку мы не можем изменить цвета в поле), у нас есть возможность изменять или подчеркивать цвет при постобработке.
Теория цвета — сложный предмет, но я настоятельно рекомендую прочитать статью Теда Гора Теория цвета и пейзажная фотография . Я часто возвращаюсь к его статье и рекомендую тщательно изучить ее.
Однако, когда я говорю о важности цвета в пейзажной фотографии, я имею в виду не только цветовые гармонии. Не менее важно понимать, как цвета ведут наш взгляд через изображение.
Распространенная ошибка, которую я вижу, — это то, что тени такие же теплые или даже теплее, чем светлые участки.Это приводит к неудачному эффекту, так как наши глаза вводятся в заблуждение, и наше внимание уводится к теневым областям, а не к основному объекту.
Чтобы изображение выглядело реалистично, необходимо, чтобы тени были на холоднее, и на менее насыщенными, , чем светлые участки. Использование маски Darks Luminosity Masks в сочетании со слоем регулировки цветового баланса в Photoshop — простой способ исправить это.
… К вам!
Не беспокойтесь, если вы виновны в одной или нескольких из перечисленных выше ошибок.Все были там, и совершение этих ошибок — просто часть улучшения.
Я призываю вас в следующий раз, когда вы будете обрабатывать снимок, уделите дополнительное время сосредоточению внимания на описанных выше ошибках. Не бойтесь увеличивать масштаб и анализировать изображения в более подробном виде. Это особенно важно, когда вы планируете распечатать изображение.
Не бойтесь увеличивать масштаб и анализировать изображения в более подробном виде. Это особенно важно, когда вы планируете распечатать изображение.
Какие еще ошибки вы часто видите в чужой (или своей) фотографии? Есть ли какая-то конкретная ошибка, которую вы делаете, но изо всех сил пытаетесь преодолеть? Я хотел бы услышать об этом в комментариях!
Gamasutra — Создание структуры постобработки:
Создание фреймворка пост-обработки для вашего игрового движка — это мощный способ настроить внешний вид вашей игры и добавить число высококачественных функций от базового цветения до манипуляции с цветовым пространством и возмущение изображения.
Сама по себе постобработка — это относительно простая область графики. программирование, но есть нюансы, за которые нужно заплатить внимание при использовании 3D-оборудования для работы в 2D-пространстве.
Статья начнется с знакомства с основами 2D-программирования. с Direct3D и немного коснувшись выравнивания пикселей, которое иногда
упускается из виду при реализации 2D-функций, а затем будет
в методы оптимизации оборудования и дать основные идеи
для определенных спецэффектов.
с Direct3D и немного коснувшись выравнивания пикселей, которое иногда
упускается из виду при реализации 2D-функций, а затем будет
в методы оптимизации оборудования и дать основные идеи
для определенных спецэффектов.
Рабочие буферы
Базовая настройка фреймворка постобработки — выделить один или несколько вспомогательных буферов (кроме обратного буфера) для рендеринг сцены, а затем скопируйте визуализированную сцену из этого буфер в задний буфер с помощью ряда фильтров постобработки. Некоторое количество вспомогательных буферов разного размера может потребоваться для разных специальные эффекты, для многопроходных фильтров или, например, для хранения данные предыдущего кадра.
Пример настройки с 4 вспомогательными рабочими буферами и обратным буфером.
В показанном случае Aux 0 используется как реальная цель рендеринга.
по всей сцене, а меньшие буферы Aux 1-3 используются во время
постобработка в качестве промежуточных этапов при передаче
сцену через различные фильтры в задний буфер для отображения.
Адресация по пикселям
Для адресации исходной текстуры по пикселям координаты исходной текстуры должны быть переведены в пиксели, что выполняется с помощью следующих формула:
dx = 1 / Ширина текстуры
dy = 1 / Высота текстуры
Это дает вам dx, dy, которые представляют собой дельты пикселей в УФ-пространстве. 0-1.
Выравнивание пикселей
Особое внимание следует уделить правильному отображению источника и целевые текстуры в центры пикселей для аппаратной интерполяции для получения правильных результатов. Если пиксели не идеально выровнены, оборудование может закончить выборку между намеченными пикселями заставляя выходной цвет быть нежелательной смесью более чем пиксель. Также в случае эффектов, использующих петлю обратной связи экрана может возникнуть растекание цвета.
В Direct3D координаты текстуры берут начало в верхнем левом углу.
угол первого текселя, в то время как координаты экранного пространства происходят
в центре первого пикселя, как показано на следующем
фигура.
Это означает, что при выравнивании исходных текселей по целевым пикселям, нарисованный целевой четырехугольник должен исходить из координаты экрана (-0,5, -0,5) в пикселях, чтобы он совпадал с верхним левым угол исходной текстуры (0,0).
Базовая настройка
Базовая настройка фреймворка постобработки будет выглядеть так: следует.
Пример кода HLSL для ввода вершинных и пиксельных шейдеров
и структуры вывода для простой структуры постобработки.
Пример кода HLSL для базовой вершины
и пиксельные шейдеры для фреймворка постобработки.
Код, показанный выше, на самом деле ничего не делает, кроме для передачи визуализированной сцены из вспомогательного рабочего буфера в задний буфер.Однако он содержит основы для добавления о более сложных эффектах постобработки.
Понимание основ постобработки [Unity]
В этой статье объясняются пост-эффекты, которые применяются к видео и изображениям, и постобработка, которая является активом для реализации пост-эффектов в Unity.
Пост-эффекты относится к применению эффектов (фильтров) к «результату визуализации информации (3D-модель, источники света и т. Д.).), который отражается в камере ».
Представьте себе приложение камеры, такое как «СНЕГ», или программу для редактирования изображений, такую как «Photoshop».
В Unity вы можете использовать его стек постобработки, загрузив и импортировав его из диспетчера пакетов.
Итого:
- постэффект
- Сами фильтры и эффекты
- Стек постобработки v2
- Ресурсы, необходимые для воссоздания пост-эффектов в Unity и STYLY
Думаю, будет легче понять, если представить его как
Чтобы быть более конкретным, вы можете добавить экранный эффект, подобный изображенному на изображении ниже.
Пост-эффект Нет
Пост-эффекты Есть
(3D-модель деревьев является бесплатным активом от Unity, Dream Forest Tree)
Освойте простые шаги, которые мгновенно улучшат качество вашей графики!
Образец
Это пространство, в котором используется постобработка. Испытайте это.
Испытайте это.
Импорт в проект
Импорт с помощью диспетчера пакетов.
Сначала импортируйте в наш проект стек постобработки v2.
Щелкните Диспетчер пакетов на вкладке «Окно» в верхней части Unity.
(выберите «Диспетчер пакетов» на вкладке «Окно»)
Когда откроется диспетчер пакетов, выберите «Постобработка из всех пакетов» и нажмите кнопку «Установить» в правом нижнем углу, чтобы установить его.
(выберите постобработку из всех пакетов)
Когда установка будет завершена, на экране появится галочка.
(когда появится галочка, установка успешно завершена)
Испытайте стек постобработки в действии
Предварительные требования
Добавьте в нашу сцену стек постобработки v2.
Выберите MainCamera в окне Иерархии (далее именуемой Иерархией).
Щелкните «Слой» в верхней части окна инспектора MainCamera («Инспектор»), а затем щелкните «По умолчанию» в появившемся списке (по умолчанию выбрано значение «По умолчанию»).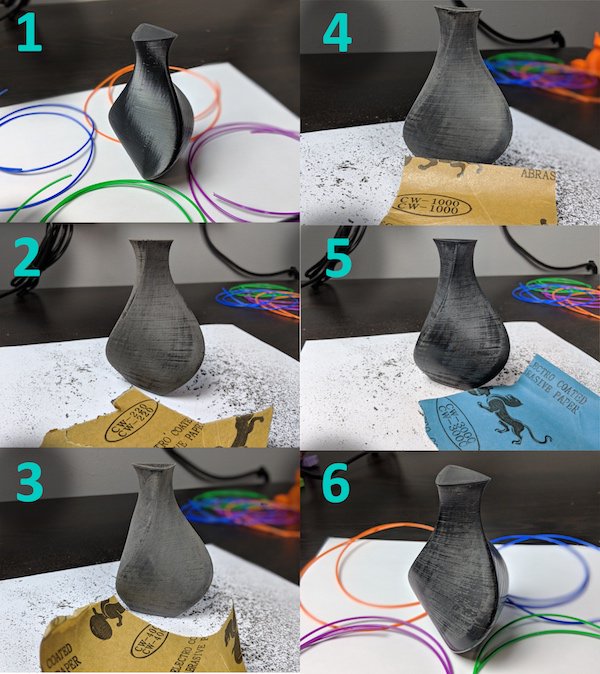
(Выберите «По умолчанию» для слоя и щелкните по нему)
Вернитесь в инспектор MainCamera, нажмите «Добавить компонент» внизу, введите «Опубликовать» в появившейся строке поиска и нажмите «Слой постобработки».
Только слой постобработки.
Это добавит в инспектор компонент слоя постобработки.
Измените вкладку «Слой» в слое постобработки на значение по умолчанию.
(* 2020/05/18 Как правило, лучше всего подготовить отдельный слой для постобработки, но из-за спецификаций STYLY пользователи не могут создать новый слой. Однако есть большая вероятность, что STYLY будет предоставить новый слой для слоев PostProcess в будущем с обновлением. В этом случае мы добавим примечание).
(Установите на «По умолчанию», потому что значение по умолчанию — ничего)
Следующим шагом является создание объекта для управления экранными эффектами для PostProcess.
Щелкните правой кнопкой мыши иерархию и выберите Create Empty, чтобы разместить новый GameObject
Щелкните Добавить компонент в Инспекторе созданного GameObject.
Введите Post в строку поиска, чтобы добавить компонент Post-Process Volume.
(только добавление объема постобработки)
Установите флажок «Глобально» в добавленном вами томе постобработки.
Нажмите кнопку «Новый» справа от элемента «Профиль».
(нажатие кнопки NEW создаст новый профиль для постобработки)
Вот и все подготовительные работы.
А теперь давайте добавим пост-эффекты!
Введение в эффекты
Стек постобработки v2 имеет несколько экранных эффектов: в томе постобработки щелкните «добавить эффект…» в томе постобработки, а затем выберите Unity, чтобы увидеть различные эффекты.
Некоторые профили несовместимы с VR, и я покажу вам один за другим.
- Глубина резкости
- Размытие в движении
- Хроматическая аберрация
- Зерно
- Виньетт
Обратите внимание, что некоторые настройки несовместимы с VR.
Кроме того, нельзя использовать «Screen Space Reflection» в STYLY.
Давайте посмотрим на эффект каждого эффекта, имея в виду вышеизложенное!
【Окружающая окклюзия】
Это экранный эффект, который отбрасывает тень на угол объекта, чтобы он выглядел как «реальность».
Этот эффект полезен для воссоздания реального пространства в VR, например школьного класса или города.
Окружающая окклюзия Нет
Окклюзия Да
【Автоэкспозиция】
Этот эффект поддерживает автоматическую настройку экспозиции. Этот эффект может выражать акклиматизацию к темноте и свету, возникающую при переходе из темной комнаты в светлую.
【Блум】
Это эффект, который может усилить свет.Этот эффект хорош для создания свечения некоторых объектов в темных местах и создания «неоновых» эффектов.
Это, вероятно, один из наиболее часто используемых эффектов, и если вы освоите его, любое пространство может выглядеть довольно хорошо.
(* Подробнее об этом позже)
Блум Нет
Цветение Да
【Хроматическая аберрация】
Эффект хроматической аберрации
Хроматическая аберрация Нет
Хроматическая аберрация Да
【Цветовая градация】
Это функция цветокоррекции. Вы можете добавить красноватый оттенок к экрану в пространстве заката и черноватый оттенок в ночном пространстве.
Вы можете добавить красноватый оттенок к экрану в пространстве заката и черноватый оттенок в ночном пространстве.
【Глубина резкости】
Он может представлять «фокус» изображения, снятого реальной камерой, также известный как «глубина резкости».
(* Не рекомендуется использовать в VR)
Глубина резкости Нет
Глубина резкости Да
【Зерно】
Этот эффект может добавить шума на экран. Этот эффект воспроизводит шум, производимый настоящими камерами в темных местах.
Зерно Нет
Зерно Да
【Искажение линзы】
Этот эффект позволяет воспроизвести искажение объектива. Вы можете создать эффект линзы «рыбий глаз».
(* Не рекомендуется использовать этот эффект в VR)
LensDistoriton Нет
LensDistoriton Да
【Размытие в движении】
Эффект, добавляющий размытие движущейся части изображения. Этот эффект используется для выражения ощущения скорости.
(* Не рекомендуется использовать этот эффект в VR)
Размытие в движении Нет
Размытие в движении Да
【Отражение экранного пространства】
(* Недоступно в STYLY)
Этот эффект предназначен для создания «отражения» объекта в реальном времени.
Обратите внимание, что этот эффект можно использовать только тогда, когда для параметра рендеринга задано значение DeferredRendering, и объекты, которые не отражаются в камере, не будут отражены.
Отражение экранного пространства Нет
Отражение экранного пространства Да
【Виньетка
Этот эффект затемняет края экрана.Вы можете использовать этот эффект, чтобы создать немного ретро-вид или гармонировать с пространством.
Виньетка Нет
Виньетка Да
Это краткое введение в эффекты, доступные в PostProcessing Stack v2.
Эти эффекты могут улучшить внешний вид ваших изображений, поэтому обязательно используйте их!
Введение в Блум
Давайте посмотрим на фактические настройки эффекта.
Выберите цветение с лучшим экранным эффектом.
Когда вы добавляете Bloom в PostProcessVolume, это выглядит так.
Прежде всего, установите флажки в красной рамке.
(* Вам не нужно устанавливать все флажки в красной рамке. Вы можете облегчить нагрузку, включив только те элементы, которые хотите использовать.)
Ниже приводится обзор настроек «Intensity», начиная с «Intensity» вверху.
【Интенсивность】
Интенсивность света. Вы можете увеличить интенсивность цветения, увеличив это значение.Установите значение по своему вкусу.
(имейте в виду, что слишком высокое значение интенсивности приведет к размытию изображения)
【Порог】
Это пороговое значение. Цветение не будет применяться к свету, яркость которого меньше установленного здесь значения.
(изменение порога с интенсивностью 20)
【Мягкое колено】
Это называется «мягкое колено», и значение может быть изменено от 0 до 1.
Чем ближе значение к 1, тем ближе эффект к пороговому значению, даже если оно не превышает пороговое значение, тем сильнее применяется эффект.
(* Значение по умолчанию 0,5 в большинстве случаев не проблема)
【Зажим】
Это элемент для настройки количества цветения на пиксель.
(* Если у вас нет проблем, вы можете использовать значение по умолчанию.)
【Распространение】
Его можно настроить по шкале от 1 до 10. Чем ближе к 1, тем меньше рассеивается свет, а чем ближе к 10, тем больше он распространяется по экрану.
【Коэффициент анаморфизма】
Вы можете установить степень искажения Блума, где от -1 до 0 — это вертикальное направление, а от 0 до 1 — горизонтальное.
(значение по умолчанию «0» подходит, если оно вам не нужно)
【Цвет】
Вы можете настроить цвет Bloom, который использует палитру цветов HDR для придания заданного цветового тона.
【Быстрый режим】
Снижает качество рендеринга Bloom и отдает приоритет производительности.
【Загрязнение】
Отражает грязь и пыль на объективе.
Вы можете обратиться к файлу изображения с помощью Текстуры и отрегулировать интенсивность грязи с помощью Интенсивности.
Это все о Блум.
Загрузить в STYLY
Загрузите предварительно созданную сцену постобработки в STYLY.
Создайте СТИЛЬНЫЙ аккаунт
Зарегистрируйтесь бесплатно
Вот как создать СТИЛЬНЫЙ аккаунт
Как создать новую учетную запись STYLY
Вот как загрузить префаб из Unity в STYLY
Как загружать префабы и сцены из Unity в STYLY
Вот как загрузить сцену из Unity в STYLY
Как загрузить сцены, созданные в Unity
Что делать, если сцена или префаб слишком тяжелые для загрузки в STYLY
Как уменьшить актив с файлом большого размера и загрузить его в STYLY
% PDF-1. 3
%
1 0 объект
> поток
application / pdf конечный поток
endobj
2 0 obj
> / ProcSet [/ PDF / Text / ImageB] / Font >>> / Thumb 12 0 R / MediaBox [0 0 612.
3
%
1 0 объект
> поток
application / pdf конечный поток
endobj
2 0 obj
> / ProcSet [/ PDF / Text / ImageB] / Font >>> / Thumb 12 0 R / MediaBox [0 0 612. ˡYA ݡ q0.Q = / 9H9gu-y «kP>: W2oBI [3ALI &` zpY> IRPN 톱 ٜ P * ϝ | 7} !: vVu; 6FNxe: Ƥȗdns ڹ 6 \ T {~
ˡYA ݡ q0.Q = / 9H9gu-y «kP>: W2oBI [3ALI &` zpY> IRPN 톱 ٜ P * ϝ | 7} !: vVu; 6FNxe: Ƥȗdns ڹ 6 \ T {~
Постобработка с намерением Рафаэля Рохаса
Твиттер
Google+
Введение
Очень заманчиво думать, что постобработка в фотографии — это нечто, не связанное с остальной частью фотографического процесса, и особенно с захватом изображений в полевых условиях. Правда, однако, в том, что постобработку не следует рассматривать как отдельный шаг в фотографии, а скорее как продолжение или, лучше сказать, кульминацию целого фотографического процесса, который начался в тот момент, когда у нас возникла идея, что мы хотел запечатлеть на фото.
В настоящее время большинство фотографов думают, что освоение постобработки — это вопрос освоения определенного программного обеспечения и изучения множества различных техник и фильтров. Правда, однако, в том, что самое важное в постобработке — это знать, каковы намерения, настроение и послание, которое мы хотим получить от финальной фотографии, чтобы иметь возможность увидеть мысленным взором финальную фотографию так, как мы хотим. это, а затем заранее знать, какие настройки тона, контраста, микроконтрастности и цвета необходимо сделать, чтобы максимально приблизиться к этому видению.Как только мы это узнаем, инструмент, который мы используем, не имеет значения, будь то аналоговая фотолаборатория, цифровая фотолаборатория или любое из множества программ, доступных для постобработки.
это, а затем заранее знать, какие настройки тона, контраста, микроконтрастности и цвета необходимо сделать, чтобы максимально приблизиться к этому видению.Как только мы это узнаем, инструмент, который мы используем, не имеет значения, будь то аналоговая фотолаборатория, цифровая фотолаборатория или любое из множества программ, доступных для постобработки.
Серакс, Швейцария (до и после) — Так я визуализировал сцену при захвате. Первоначальная ситуация выглядела совсем иначе под ярким синим солнцем. Композиция создавалась с учетом постобработки. По прибытии в студию визуализированная идея была сформирована путем корректировки тона, контраста и насыщенности цветов
.Analogic vs.цифровая фотолаборатория
В настоящее время мы делаем то же самое с цифровыми негативами, как старые мастера делали в темной комнате при печати негатива под увеличителем. Мы «печатаем» наши цифровые негативы с помощью программного обеспечения для разработчиков сырых материалов и можем решить, какую интерпретацию мы хотим придать окончательной фотографии и печати. Мы можем использовать другие инструменты, чем те, что используются в темной комнате, но мы по-прежнему контролируем одни и те же параметры: тон, контраст, микроконтраст, насыщенность цвета и локальные настройки.
Мы можем использовать другие инструменты, чем те, что используются в темной комнате, но мы по-прежнему контролируем одни и те же параметры: тон, контраст, микроконтраст, насыщенность цвета и локальные настройки.
В цифровой фотографии, однако, поскольку мы видим эффекты корректировок в реальном времени, мы рискуем стать ленивыми и полагаться на метод проб и ошибок, в котором мы просто меняем каждый ползунок в обоих направлениях, пока не захотим. что мы видим на экране. Как и прежде, лекарство от этой болезни заключается в том, чтобы заранее знать, что нужно изображению и как этого добиться.
Волны и скалы, Исландия Столкнувшись с нашим необработанным изображением, мы можем делать именно то, что делали старые мастера пленочной фотографии: анализировать сцену и заранее делать заметки о том, что нужно сделать, чтобы приблизиться к нашему окончательному замыслу.Глобальные и локальные корректировки можно запланировать заранее в уме, и все это до использования какого-либо инструмента постобработки.
База для постобработки — Визуальный дизайн
Основой всей пост-обработки является визуальный дизайн. Наш разум очень особым образом реагирует на формы, цвета, линии, текстуры и глубину. Все эти элементы несут с собой различные эмоциональные коннотации и организуют то, как наши глаза просматривают сцену и извлекают из нее смысл. Таким образом, овладение визуальным дизайном даст нам инструменты для «формирования» определенного намерения и сообщения, которые будут расшифрованы будущими наблюдателями наших изображений.Конечно, мы можем выбирать и изменять визуальный дизайн наших изображений во время захвата, изменяя положение камеры, кадрирование и т. Д. Но мы также можем дополнительно изменять и настраивать визуальный дизайн во время разработки негатива или необработанного цифрового файла. . Это то, что мы понимаем под постобработкой.
Это осознание помогает нам понять, что, когда мы идем домой и обрабатываем наши изображения, мы продолжаем и улучшаем работу, начатую в полевых условиях, настраивая визуальный дизайн нашего изображения так, чтобы определенные аспекты усилены, а другие скрыты.
Композиция сосредоточена на мягких, нежных и элегантных чертах ландшафта Намибии. Постобработка, позже одна из которых, пыталась сохранить согласованность с работой, проделанной во время захвата, фокусируясь на улучшении настроения и качеств, которые искал фотограф. В этом случае был использован мягкий контраст, пастельные тона и панорамный формат, чтобы устранить отвлекающие факторы и усилить форму холма.
Wood vortex, ШвейцарияВ этом примере мы сделали прямо противоположное.Энергия, содержащаяся в коре старой лиственницы, была визуально преобразована в яркое, динамичное и энергичное упражнение визуального дизайна: яркие и дополняющие цвета, высокий контраст и высокий микроконтраст.
Цели постобработки
Мы уже говорили, что основная цель постобработки — это точная настройка, формирование и адаптация визуального дизайна наших захваченных изображений. Однако причин, по которым мы могли бы захотеть адаптировать визуальный дизайн, множество:
A.
 Настройка настроения и атмосферы:
Настройка настроения и атмосферы: Мы знаем, как цвета, тона, текстуры, формы и линии несут с собой эмоциональные коннотации.Мягкое контрастное изображение с теплыми оттенками передаст романтику, мягкость и спокойствие, а яркие, контрастные тона и цвета с четкими диагоналями и треугольниками передадут динамизм и волнение. Таким образом, адаптируя визуальный дизайн, мы можем адаптировать настроение и атмосферу нашего изображения.
Это то, что может привести к разной интерпретации одного и того же изображения. Уникальный, единственный необработанный файл может уступить место множеству различных интерпретаций и финальных изображений. На самом деле, очень часто, когда мы растем и становимся зрелыми как художники, мы пересматриваем старые изображения и обрабатываем их совсем по-другому.Конечно, в творческой фотографии нет правил, рецептов или сценариев, но мы могли бы перечислить некоторые из наиболее типичных намерений или настроений, которые мы можем передать определенной фотографии пейзажа:
- Beautiful: Яркие цвета, яркий общий тон, дополнительные цвета и нормальный уровень контрастности. Эти образы привлекают внимание и акцентируют внимание на эстетических ценностях изображаемого объекта. Вишневые холмы, Швейцария
«Красивое» — самое подходящее прилагательное для весенней сельской местности Швейцарии, и именно так было обработано это изображение.Яркие и насыщенные цвета, не слишком агрессивный контраст и микроконтраст, яркие тона.
 Эти образы привлекают внимание и акцентируют внимание на эстетических ценностях изображаемого объекта. Вишневые холмы, Швейцария
Эти образы привлекают внимание и акцентируют внимание на эстетических ценностях изображаемого объекта. Вишневые холмы, Швейцария- Sublime: Смесь эпоса с меньшей красотой и большей долей тайны. Освещение и фейерверк, Швейцария
Обработка была сосредоточена на создании чувства страха, смешанного с опасностью: высокая контрастность, высокая насыщенность цветов, темные тени и сильный туннельный эффект, чтобы сфокусировать зрение в центре кадра.
- Пастораль: Мягкий, спокойный и тихий.Элегантные и нежные образы. Они изображают красоту, смешанную с хорошей дозой безмятежного созерцания. Аппенцелль, Швейцария
Пастельные и яркие цвета, низкая контрастность и микроконтрастность, яркие тона… все они делают швейцарский пейзаж поздней осени привлекательной и успокаивающей сценой.

- Радостный: Яркие, энергичные, позитивные и оптимистичные образы, которые заставляют нас чувствовать себя хорошо Цвета Прованса
Есть ли что-нибудь более оптимистичное и радостное, чем яркие краски летнего провансальского пейзажа? Постобработка была направлена на улучшение дополнительных цветов, хорошее сочетание яркости цвета, высокие значения тона и высокую контрастность.
Б. Дополняющая композиция:
Другой основной целью постобработки является усиление композиции путем добавления визуального веса к областям, которые более важны на изображении (фокусные точки), и путем уменьшения других отвлекающих областей, которые менее важны и которые могут конкурировать за внимание с главной темой.
Вот некоторые типичные примеры:
- Усиление фокуса:
Фокус — это область изображения, в которой мы хотим получить максимальный визуальный вес, поскольку это ключевой элемент всей композиции, которую мы хотим выделить.Постобработка может использоваться для увеличения визуального веса этой области путем добавления контраста, повышения яркости ее тона, насыщения цветов или затемнения всего остального вокруг фокальной точки. Идея состоит в том, чтобы привлечь внимание к визуальному дизайну. Два ледяных блока, ИсландияВизуальный вес почтового фокуса (большая глыба льда) и вторичного фокуса (небольшая глыба льда) увеличился во время постобработки: больше контраста, ярче бликов, больше микроконтрастности .Небо было затемнено, чтобы сделать его менее захватывающим.
- Ведущий взгляд:
Постобработка также может помочь нам организовать то, как глаз наблюдателя будет перемещаться и читать определенное изображение. Изменяя тон, контраст и цвет, мы можем направлять взгляд наблюдателя более или менее предопределенным образом. Ручей к морю, остров Харрис, ШотландияБыла использована постобработка, чтобы усилить детализацию потока за счет увеличения микроконтрастности. Тона песка и ручья стали ярче, а небо потемнело.Светлые и средние тона воды из ручья также стали ярче.
- Ограничение визуального ввода до самого минимума:
Чем меньше, тем лучше, и, используя постобработку для уменьшения визуального беспорядка и избытка деталей (визуальной информации), мы можем гарантировать, что суть фотографии сильнее и Наблюдатель сосредоточит свое внимание на важных областях. Например, мы можем затемнить тени, чтобы детали тонули, а глаз не тратил свое внимание на то, что скрывается внутри, или мы можем осветлить светлые участки, чтобы фон стал чистым и чистым листом бумаги, на котором кажется основным объектом. держаться на плаву.С помощью постобработки мы можем направить и сосредоточить внимание наблюдателя на самом важном. Гондола и мост, ВенецияНеобработанный файл захватил детали во всех областях изображения. Однако во время постобработки все детали в тенях были стерты, чтобы сосредоточиться на резком и смелом визуальном дизайне контуров. Цель заключалась в создании более символического и менее буквального образа Венеции.
C. Глубина создания:
Глубина — это иллюзия, поскольку фотографии двумерны.Мы должны решить, хотим ли мы глубины в наших изображениях, в зависимости от того, какое намерение и настроение мы хотим им передать. Различные ситуации могут вызвать восприятие глубины в нашем мозгу. Некоторые из этих ситуаций зависят от освещения, другие — от погодных условий, третьи — от решений, принятых во время съемки (например, направления света), а третьи — от чисто визуального дизайна изображения. Последние могут быть изменены, улучшены или скрыты во время постобработки.
Итак, мы используем приемы тона, цвета и микроконтрастности, чтобы придать изображению впечатление глубины. Это можно сделать, включив наслоенные узоры тени и света, увеличив объем определенных предметов с помощью локальной настройки тона или направив взгляд в кадр, например, с помощью постепенной резкости или контраста.
Лестница, ФранцияФотографии плоские, поэтому ощущение глубины — визуальная иллюзия. Эту иллюзию можно создать с помощью разных «уловок».На этом изображении действуют различные виды иллюзий «визуальной глубины», как мы увидим: линейная перспектива, воздушная перспектива, перспектива резкости, тональное наслоение, световая скульптура и убывающая перспектива.
D. Создание гармонии и баланса (или противоречия и противопоставления):
Визуальное равновесие в значительной степени связано с коннотацией стабильности, спокойствия, безопасности. Точно так же визуально несбалансированные изображения передают напряжение, энергию, движение, опасность … и могут восприниматься зрителем как угроза.
Когда мы обсуждаем баланс в изображениях, мы можем делать это, обращаясь к различным уровням. Например, мы можем ссылаться на баланс в соответствии с тоном, цветом или даже настроением среди группы разных фотографий, которые должны быть частью согласованной работы.
Мы часто используем постобработку, чтобы придать изображению однородность тона и цвета и связность. Например, нам может потребоваться аналогичная палитра тонов и цветов в небе и на земле или в воде и небе, и с помощью постобработки мы можем настроить баланс белого (цветовой оттенок), тона и контраст так, чтобы каждая часть изображения работает вместе как гармоничная группа.Однако иногда мы используем постобработку, чтобы создать прямо противоположное: противоречие и противопоставление между различными частями изображения.
Два потока — Остров Харрис, ШотландияБаланс белого был изменен не только глобально, но и локально, изменив цветовой баланс изображения. Баланс белого для песка и мрамора был настроен в сторону более теплой части спектра. Баланс белого в небе также был настроен локально, так что синие области хорошо сбалансированы с океаном и далеким небом, тогда как освещенные области облаков хорошо сбалансированы по цвету с песком и камнями на переднем плане.Общее ощущение равновесия.
Заключение
Конечная цель постобработки — придать неочищенной глине цифрового негатива окончательную скульптуру (финальную фотографию). Мы садимся, анализируем, отпускаем и моделируем из глины нечто, что становится все ближе и ближе к визуализированной фотографии, которую мы имеем в виду. Как мы понимаем, это ответственность фотографа, и никто не сможет обработать наши изображения так же хорошо, как мы.Важно не знать, как использовать инструменты постобработки, а скорее прислушиваться к нашему первоначальному замыслу, смотреть на фотографию и иметь возможность заранее знать, какие корректировки необходимо сделать. Как только мы узнаем, что и почему, относительно легко освоить то, как, то есть использование инструментов для изменения контраста, тона, микроконтрастности и цвета, чтобы подтолкнуть наш исходный необработанный файл к визуализированному окончательному изображению.
Специальное предложение:
Для получения дополнительной информации мы рады предложить электронную книгу Рафаэля «Постобработка с намерением» со 120 страницами, полными содержания, примеров и упражнений из Essential Seeing.Вы можете получить скидку 25% с кодом купона «ESSENTIALTOPAZ» при оформлении заказа.
Получите его сейчас по адресу: http://essentialseeing.com/ebook/post-processing- with-intent- ebook /
О Рафаэле Рохасе
| Рафаэль Рохас, мастер Hasselblad, международно награжденный фотограф изобразительного искусства, автор, лектор и педагог. Он является директором Essential Seeing, компании, занимающейся обучением людей тому, как видеть и использовать фотографию как творческий инструмент значимого личного самовыражения, посредством вдохновляющих электронных книг, видео и мастер-классов по фотографии.Вместе с его женой Анкой они организовывают поездки с фото-погружением в одни из самых вдохновляющих и аутентичных мест по всему миру. Он также является автором постобработки электронной книги с намерением | |
| Мастерские — Электронные книги |
3D-печать: влияние постобработки
Восприятие и перспективы 3D-печати заключаются в том, что она предлагает простой, быстрый и автоматизированный цифровой рабочий процесс, несложный.Это восприятие в целом верно до момента удаления деталей из 3D-принтера. Как только детали поступают на этап постобработки, автоматизированный процесс с использованием кнопки становится ручной операцией, которая влияет на время, стоимость и качество.
Новые пользователи 3D-печати часто бывают шокированы, узнав, что действительно требуется для подготовки деталей к доставке.Непосвященные — новички в 3D-печати — часто бывают шокированы, узнав, что действительно требуется для подготовки деталей к доставке.С другой стороны, давние пользователи склонны воспринимать постобработку как «необходимое зло». Поскольку все современные технологии 3D-печати требуют постобработки, опытные пользователи несут дополнительную нагрузку и вносят оперативные изменения.
Постобработка — это операция, не добавляющая ценности, которая увеличивает накладные расходы и накладывает ограничения. Это усложняет рабочий процесс 3D-печати, увеличивает расходы и увеличивает время доставки. Для лаборатории 3D-печати, где операции централизованы и управляются специальным персоналом, это нежелательно.Для работы в офисной среде это неприемлемо, поэтому данная технология лучше всего подходит для лаборатории, а не удобна для инженеров и дизайнеров.
Независимо от режима работы постобработка является препятствием для расширения текущими пользователями и препятствием для более широкого внедрения теми, кому еще предстоит наладить внутренние операции. Этот процесс, не приносящий добавленной стоимости, ограничивает частоту использования 3D-печати, жизнеспособные приложения и обслуживаемые рынки.
Обзор постобработки
Постобработка включает в себя все действия, которые выполняются после удаления деталей из 3D-принтера. Есть две категории постобработки: первичная и вторичная.
Первичная постобработка включает в себя обязательные шаги, которые должны выполняться на всех частях, чтобы сделать их пригодными для использования в любом приложении. Шаги различаются в зависимости от технологии, но обычно включают в себя уборку и поддержку удаления структуры. Опытные пользователи часто называют этот базовый уровень отделки «разборкой и отправкой», потому что полученные детали лишены каких-либо украшений, улучшающих качество.
Вторичная постобработка включает в себя дополнительную чистовую обработку детали, которая улучшает эстетику или функциональность детали. Вторичная постобработка обычно включает шлифование, шпатлевку, грунтование и окраску; однако он также может включать, например, механическую обработку или покрытие. Операции постобработки могут быть автоматическими, полуавтоматическими или ручными, и они могут быть последовательными или пакетными. Развертывание
Office нецелесообразно, когда требуется первичная постобработка.Например:
плавленое Осаждение моделирования (FDM):
структуры Удалить поддержки (ручная, последовательное)
Подшлифовки для удаления опорной конструкции остатки (ручные, последовательная) или
поддержкибрутто удаление (ручное, серийное)
Замачивание для растворения опор (автоматическое, периодическое)
Удалите / отрежьте все нерастворенные остатки (вручную, серийно)
Промойте и высушите (вручную, серийно)
Стереолитография (SLA):
Полное удаление опор (ручное, серийное)
Замачивание для удаления остаточной смолы (автоматическое, периодическое)
Отверждение в ультрафиолетовой (УФ) печи (автоматическое , партия)
Удаление оставшихся опорных конструкций (вручную, серийно)
Легкое шлифование для удаления дефектов поверхности (вручную, серийно) )
2D Аналогия
В контексте 2D-печати пост-обработка аналогична шагам, необходимым для подготовки нескольких копий отчета при печати на обычном настольном принтере.Работа не завершена, когда печать завершена. Перед распространением страницы сортируются, перфорируются и вставляются в подшивку. Эта ручная операция увеличивает время и затраты.
Лучшая аналогия — фотография. Восприятие и обещание 3D-печати — это процесс, похожий на цифровую фотографию — в момент после фотографирования изображения готовы к распространению.
Реальность такова, что 3D-печать больше похожа на пленочную фотографию, когда фотограф проявляет изображения в темной комнате, в которой находится оборудование и химические растворы.Во время проявки фотограф контролирует качество получаемых фотографий и эффекты изображения. В отличие от аналогии с двухмерной печатью, которая требует только времени и затрат, пленочная фотография также требует площади, оборудования и навыков.
Время, стоимость, оборудование, площадь и навыки — вот отличительные черты этапа постобработки 3D-печати.
Опыт пользователей
В этой статье шесть компаний предоставили свой опыт постобработки. Эти компании представляют автомобилестроение, потребительские товары, медицинское оборудование, спортивные товары и архитектуру.Каждый отметил, что время постобработки и требуемые ресурсы различаются в зависимости от технологии и детали, тем не менее, они любезно сообщили о своих типичных потребностях.
Время. По словам этих компаний, потенциальные пользователи должны запланировать один час постобработки на каждые от одного до шести часов 3D-печати. Это означает увеличение общего времени процесса на 17–100%; однако общее прошедшее время часто будет намного больше, как будет обсуждаться позже. Все компании отметили, что время зависит от сложности или сложности детали; например, постобработка маленьких сложных деталей занимает больше времени, чем больших простых деталей.
Персонал. Персонал — еще одно соображение для потенциальных пользователей. Компании сообщили, что соотношение операторов станков и отделочников — сотрудников, занимающихся постобработкой, — колеблется от 1: 1 до 1: 3. Для небольших лабораторий оператор может разделить свое время между подготовкой файлов, работой с машиной и постобработкой, что означает, что есть затраты на рабочую силу, но в бюджете нет дополнительных расходов на заработную плату. Когда общая пропускная способность достигнет уровня, когда один человек не сможет выполнять обе функции, потребуется дополнительный персонал.
Объекты. Также необходимо учитывать удобства. Предоставляя достаточно места для необходимого оборудования и рабочего пространства для проведения пост-обработки, эти компании сообщают, что у них есть планы этажей, в которых для пост-обработки используется от половины до одного квадратного фута на каждый квадратный фут пространства 3D-принтера.
Воздействие: основные проблемы
Неудивительно, что самые большие проблемы с постобработкой связаны с дополнительными затратами и дополнительным временем, которые могут быть весьма значительными.И время, и деньги были отмечены шестью участвующими компаниями в качестве их основных забот; однако ранжированные приоритеты для каждого из них менялись и определялись текущим климатом в компаниях. Стоимость была второстепенной для тех, кому нужно срочно ускорить доставку 3D-печатных моделей и прототипов.
Деловой климат и корпоративные цели также повлияли на воспринимаемое влияние постобработки; например, заработная плата, выплачиваемая за постобработку, рассматривалась как препятствие для продвижения и инноваций, ограничение общего производства или утечка финансовых ресурсов.
Хотя отрицательные эффекты постобработки универсальны, последствия этого необходимого шага интерпретируются через призму текущих задач и целей организации.
Стоимость. Пост-обработка увеличивает стоимость операций 3D-печати по ряду причин, но наиболее часто упоминаемым аспектом является стоимость рабочей силы. Используя полностью загруженную рабочую силу, компании сообщили о почасовых затратах от 30 до 100 долларов. При использовании от четырех до десяти 3D-принтеров годовые затраты на рабочую силу с полной нагрузкой составляли от 100 000 до 500 000 долларов.Это равносильно прямым затратам на рабочую силу для постобработки примерно от 25 000 до 50 000 долларов в год для каждого 3D-принтера. Если оператор станка или другой сотрудник с более высокой заработной платой выполняет постобработку, годовые затраты могут значительно возрасти.
При добавлении 3D-принтера эти дополнительные затраты на рабочую силу должны быть включены в годовые операционные бюджеты. Руководитель технологии аддитивного производства в компании, производящей медицинское оборудование, сказал, что с учетом бюджета «добавление еще одного финишера означает, что я могу купить на одну машину меньше.”
Для тех, кто уже обременен постобработкой, преимуществом устранения этой задачи может быть не снижение затрат, а расширение возможностей. Принимая во внимание бюджетные ограничения, препятствующие найму, вкладчики указали, что они перераспределят персонал постобработки для дополнительных видов деятельности; Например, компания по производству медицинского оборудования заявила, что перераспределит свой персонал для работы, которая либо улучшит ее операции по 3D-печати за счет развития технологии, либо перенаправит персонал на вторичную постобработку, которая улучшит качество и внешний вид деталей, напечатанных на 3D-принтере.
Майкл Зербе, руководитель отдела технологий RP в Newell Rubbermaid, отметил, что кадровые ограничения влияют на качество деталей и использование 3D-принтера. Он сказал, что без первичной постобработки сотрудники могли бы потратить время на улучшение моделей, напечатанных на 3D-принтере, с дополнительной отделкой и покраской. Но что более важно, он мог увеличить объем своей 3D-печати. Он сказал: «С моими ресурсами постобработки я могу запускать свои 3D-принтеры только с коэффициентом использования 60%. Исключите постобработку, и я смогу запускать их круглосуточно.Это означало бы большую пропускную способность, что позволило бы нам выполнять больше итераций для каждого проекта ».
Другой элемент затрат, связанный с рабочей силой, — это увеличение стоимости моделей и прототипов, когда спрос превышает возможности группы постобработки. Технический менеджер компании по производству потребительских товаров отметил, что в периоды пиковой нагрузки у него может быть необходимая мощность 3D-принтера, но не хватает необходимых ресурсов для постобработки. В таких ситуациях ему приходится либо платить за сверхурочную работу, либо передавать работу сервисному бюро по субподряду.Он отметил: «Аутсорсинг увеличивает стоимость детали в три или четыре раза, и мы не можем выполнить работу так быстро, как если бы мы выполняли работу внутри компании».
Время. Ключевым преимуществом 3D-печати является скорость, поэтому все, что замедляет процесс, нежелательно. Хотя отдельная деталь может быть быстро подвергнута постобработке, совокупный эффект может увеличить время выполнения заказа на дни или недели.
(слева) Промышленный 3D-принтер RIZE ™ One позволяет создавать детали из термопласта с улучшенными характеристиками с помощью простой постобработки. (Справа) Настольный промышленный 3D-принтер XRIZE ™ позволяет пользователям изготавливать функциональные полимерные и композитные детали в полном цвете.Как рассказали участники, постобработка увеличивает время 3D-печати от 17% до 100% для каждой партии. Эти цифры не отражают в полной мере влияние этого руководства, как узкое место в расписании. Несколько часов постобработки могут превратиться в 24-часовую задержку, даже при хорошо укомплектованном персонале. При составлении нескольких итераций проектирования задержка может измеряться неделями.
Влияние затрат на постобработку
30–100 долларов в час ставка обремененной рабочей силы
100–500 долларов в год Расходы на персонал
25–50 тысяч долларов в год на 3D-принтер
Ограничения возможностей из-за укомплектования персоналом
Пиковый спрос: добавленные затраты на аутсорсинг
Помещения (1 / 2-1 кв.футов на квадратный фут площади 3D-принтера), плюс оборудование и коммунальные услуги
В Reebok типичное время сборки для процесса экструзии материалов составляет восемь часов. Затем за заданиями 3D-печати следует постобработка, которая может включать четырехчасовую выдержку для растворения поддерживающих структур. Этот полуавтоматический этап добавляет 50% к общему времени обработки, но общее время, затраченное на доставку детали, может увеличиться на 350%, что превратит однодневную доставку в два.
По словам Гэри Рабиновица, менеджера лаборатории Reebok RP: «Постобработка может добавить еще один день к расписанию, что означает, что проверка проекта и выпуск следующей итерации дизайна также откладываются.”
Например, если файл получен утром первого дня, сборка может быть запущена в 9:00. При восьмичасовой сборке 3D-печать завершается в нерабочее время в 17:00. Удаление поддержки начинается первым делом на второй день и заканчивается в полдень. У этой восьмичасовой печати есть 36-часовой оборот, даже если график широко открыт и персонал доступен. Конечно, вторая смена может ускорить процесс, но, как обсуждалось ранее, эта вторая смена приведет к дополнительным расходам, которые могут не поддерживаться бюджетами.
Влияние постобработки на время
Увеличение времени 3D-печати на 17% -100%
Задержки превышают добавленное время
Узкие места и задержки
Без постобработки итерация доставки и дизайна может произойти на день раньше. Как отметила одна компания, производящая потребительские товары, совокупный эффект за несколько итераций может длиться неделю или больше. Его технический менеджер сказал: «Если сборка завершится во второй половине дня и если не будет постобработки, у нас может быть следующая итерация сборки к концу дня.С постобработкой он растягивается на целый день ». Эта компания обычно делает от пяти до десяти итераций для каждого продукта, что приводит к общей задержке от одной до двух недель, если включены выходные.
Для этих компаний отказ от постобработки резко ускорит процесс разработки продукта, что, в свою очередь, может сократить время вывода продукта на рынок. На повседневном уровне пост-обработка может быть разницей между своевременной доставкой на важную встречу или выходом с пустыми руками.
Еще одним фактором, увеличивающим вероятность задержек, является то, что постобработка может быть узким местом, из-за которого возникают задержки. Автоматизированный процесс 3D-печати обычно выводит много деталей на сборку, и все они проходят постобработку одновременно. Учитывая необходимость непосредственного труда и доступа к вспомогательному оборудованию, детали ждут в очереди, пока не станут доступны ресурсы. Руководитель технологии AM в компании по производству медицинского оборудования сказал: «Меня убивает, когда я вижу лотки с деталями поздно в пятницу, зная, что они не будут доставлены до конца дня понедельника.
Автомобильная компания отметила, что узкое место становится очевидным после долгих праздничных выходных. Используя автоматические операции, как можно больше деталей вкладываются для печати за один длительный тираж в течение трех дней; однако при возобновлении работы ресурсы постобработки перегружаются. Инженер по литью в компании сказал: «Есть незавершенные дела, даже если постобработка автоматизирована. Иногда оборудование для постобработки просто не имеет пропускной способности или мощности, сопоставимой с производительностью 3D-принтеров, работающих в течение нескольких дней.”
Без постобработки ценность 3D-печати могла бы существенно возрасти. Для некоторых это позволит им выполнять больше задач с добавленной стоимостью, чтобы улучшить качество деталей и расширить базу приложений. По мнению других, это значительно ускорит весь процесс, что повысит скорость реагирования и общую пропускную способность. Для тех, кто добавляет новые 3D-принтеры, отказ от постобработки снизит трудозатраты на 25 000–50 000 долларов на каждую машину; однако бремя постобработки не ограничивается затратами на рабочую силу и общим временем процесса.
Влияние: второстепенные проблемы
Последствия постобработки гораздо шире, чем затраты на рабочую силу и задержки в расписании. Хотя шесть компаний считают их второстепенными проблемами, нельзя игнорировать влияние на качество, укомплектование персоналом, помещения и безопасность.
Качество. В конечном счете, качество деталей, напечатанных на 3D-принтере, находится в руках отделочников, которые используют ножи X-Acto, наждачную бумагу и распылительные сопла для струйной или водоструйной обработки. Компания по производству медицинского оборудования отметила, что при использовании ручного труда трудно поддерживать согласованность и точность для множества копий одной и той же детали.
Компания по производству потребительских товаров сообщила, что для сложных деталей с тонкими характеристиками она часто делает выбор в пользу создания дубликатов на тот случай, если оригинал будет поврежден или сломан. Изготовление дубликатов увеличивает стоимость и потребляет ценные ресурсы 3D-принтера.
Персонал. Для тех, у кого есть бюджет для найма персонала, занимающегося постобработкой, проблема сводится к поиску подходящего таланта. По словам технического менеджера компании по производству потребительских товаров, «постобработка — это своего рода искусство.«Отделка деталей требует уникального набора навыков и индивидуальности.
Для поддержания качества детали, напечатанной на 3D-принтере, персонал, занимающийся постобработкой, должен обладать навыками создания моделей: ловкостью рук и опытом использования имеющихся в их распоряжении инструментов. Тем не менее, они должны продемонстрировать эти навыки, находясь под сильным давлением, чтобы обеспечить быстрое выполнение поставленных задач. Из всего трудового коллектива лишь небольшой процент обладает таким сочетанием навыков и темперамента, что усложняет процесс найма.
Объекты. Площадь требуется для размещения персонала, рабочих столов и оборудования для последующей обработки. Как указывалось ранее, во многих случаях потребуется соотношение от половины до одного квадратного фута на квадратный фут пространства 3D-принтера. Это пространство может быть препятствием для тех, у кого нет возможности расширяться в существующие области, расходами для тех, кто должен взять на себя строительство, или текущими расходами для тех, у кого есть внутренние перекрестные платежи за площадь пола, используемую отделение.
Еще одним соображением относительно стоимости является покупка верстаков и оборудования, которые обойдутся в тысячи долларов для типичной, но небольшой лаборатории по 3D-принтеру.Также существуют дополнительные расходы на прокладку инженерных сетей, таких как электрические, водопроводные и воздушные линии к оборудованию.
Безопасность. Безопасная эксплуатация, обращение и утилизация — это источники скрытых затрат, которые многие не учитывают до тех пор, пока не будет внедрен 3D-принтер. По заявлению компании, производящей медицинское оборудование, в организации действует строгая программа безопасности, что означает, что для каждого сотрудника, добавляемого к персоналу постобработки, требуется больше ресурсов безопасности. Кроме того, операция 3D-печати является крупнейшим источником опасных отходов на всем ее научно-исследовательском предприятии.Правильная утилизация опасных отходов, образующихся во время постобработки, стоит довольно дорого.
Office Operations
В лабораторной среде проблемы и ограничения, создаваемые постобработкой, являются препятствием для пропускной способности и качества деталей, а также истощают бюджеты и ресурсы. В области дизайна или инженерии эти проблемы являются серьезными препятствиями для принятия.
Три из шести компаний выразили немедленное желание развернуть 3D-печать в офисных помещениях, сохранив при этом существующую лабораторию 3D-печати.Преимущество распределенной 3D-печати состоит в том, что у дизайнера или инженера будет более быстрая обработка как офисных, так и лабораторных деталей.
При размещении 3D-принтеров в офисе модель самообслуживания более гибкая, потому что она обходит очередь работы лаборатории. Между тем, лаборатория более оперативна, поскольку снимает нагрузку с базовых моделей и прототипов. Все согласны с тем, что развертывание офиса нецелесообразно, когда требуется первичная постобработка. Архитектурная фирма сослалась на грязное и неприглядное рабочее место, автомобильная компания сослалась на химические вещества и оборудование, а компания, производящая потребительские товары, сослалась на высокую нагрузку на рабочую силу для инженеров, выполняющих отделку деталей.
Чтобы 3D-печать в офисе стала реалистичной, она должна имитировать рабочий процесс полнофункционального 2D-принтера или цифровой камеры. Это становится реалистичным, когда одно устройство выводит готовые к использованию элементы без дополнительных затрат труда, оборудования и площади. Это становится жизнеспособным вариантом, когда умение, темперамент и безопасность перестают быть важными.
Заключение
Устраните постобработку, и станет возможным размещать 3D-принтеры в рабочих группах, которым нужны модели и прототипы.Избавьтесь от постобработки, и лаборатории по 3D-принтерам станут более эффективными, оперативными и менее дорогостоящими.
Постобработка — это функция, не создающая добавленной стоимости, которая одновременно является бременем и узким местом. Без этого обещание простого, быстрого и автоматизированного цифрового рабочего процесса становится реальностью для всех частей, простых или сложных по конструкции. В этой новой реальности внедрение 3D-печати ускорится, а спектр приложений расширится для организаций всех типов и размеров, для всех отраслей и рынков.
Эта статья была написана Тоддом Гриммом от имени RIZE Inc., Woburn, MA. Для получения дополнительной информации посетите здесь .
Tech Briefs Magazine
Эта статья впервые появилась в выпуске журнала Tech Briefs за январь 2019 года.
Читать статьи в этом выпуске здесь.
Другие статьи из архивов читайте здесь.
ПОДПИСАТЬСЯ
Понимание постобработки фотографий
У вас есть проблемы с тем, чтобы ваши фотографии отражали то, что вы видели и чувствовали, когда снимали их? Вы когда-нибудь чувствовали, что ваши фотографии выглядят скучно и скучно? Этот пользующийся спросом учебный курс разработан, чтобы помочь вам преобразовать процесс редактирования.Откройте для себя приемы и приемы Lightroom, которые удостоенный наград фотограф Митчелл Канашкевич использует для создания своих потрясающих изображений. Найдено здесь: Общие сведения о постобработке
Общие сведения о постобработке
Общие сведения о постобработке — это уникальный образовательный инструмент от отмеченного наградами фотографа-путешественника. Вы учитесь в действии, работая с 10 предоставленными файлами RAW и следуя инструкциям из 10 видеоуроков. Каждая важная техника освещена более подробно с помощью 52 дополнительных примеров, которые были деконструированы.Полученные знания сэкономят вам бесчисленное количество часов. В этих руководствах рассказывается о десятилетнем опыте проб, ошибок и эволюции.
Что включено?
- 10 изображений в формате RAW, которые помогут вам сразу же попрактиковаться.
- 10 подробных видеоуроков о том, как постобработать каждое изображение RAW.
- Еще 52 фото примера (внутри видео).
- Почти 3 часа оригинального образовательного видеоматериала без жаргона.
- Особое внимание уделяется изучению не только «Как?» но почему?
Учебники по углубленному редактированию фотографий
Подходит ли вам понимание постобработки? Да, если вы:
- Почувствуйте, что ваши изображения не раскрывают весь свой потенциал из-за постобработки.
- Желание создавать фотографии, отражающие то, что вы видели и чувствовали.
- Стремитесь, чтобы ваши фотографии выглядели живыми, динамичными и яркими.
- Ищите правильный баланс между недостаточной и избыточной обработкой.
- Хотите понять не только как? но почему? за постобработкой.
- Предпочитаю изучать Lightroom на практике.
- Хотите знать, как профессиональный фотограф обрабатывает изображения для всемирно известных публикаций.
О фотографе — Митчелл Канашкевич — путешественник / фотограф-документалист.Его работы публиковались в таких журналах, как National Geographic Traveler, Vanity Fair, Lonely Planet Traveler, Geographic UK и попали в частные коллекции фотографий по всему миру. Митчелл объясняет большую часть своего успеха своим глубоким знанием и пониманием постобработки.
Примеры до и после
«Независимо от того, насколько сильна композиция, насколько драматичен момент или насколько интересен объект в видоискателе, потенциально отличная фотография никогда не будет сиять, пока она не будет подвергнута постобработке со знанием дела.»-Митчелл Канашкевич
Найдено здесь: Общие сведения о постобработке
.